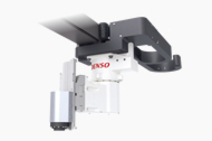
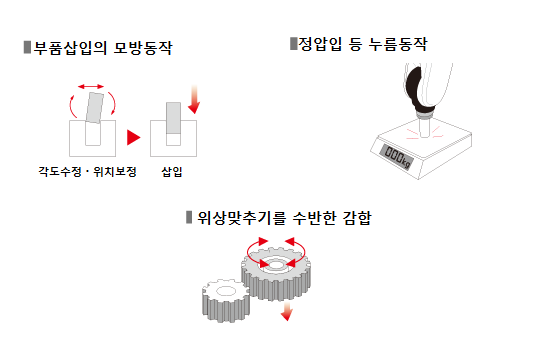
힘 센서를 사용해 로봇 손끝의 가압력을 일정하게 제어할 수 있습니다.
대응 로봇
수직다관절 로봇 Ver.1.6.*부터
수직다관절 로봇 Ver.2.3.*부터
힘 센서로부터의 피드백 제어와 덴소의 독자적인 제어 알고리즘으로 섬세한 모방, 감합, 가압 동작이 가능합니다.
전용 GUI로 힘 센서로부터의 피드백 값의 모니터링이나 힘 제어 설정 조정이 가능해져 기동 공정수 절감에 기여할 수 있습니다.

※당기능은 로봇이 사람에게 충돌·접촉했을 때에, 그 힘을 저감 하는 안전 기능이 아닙니다.
※힘 센서는 다음 중 하나의 제조사의 제품을 사용할 수 있습니다.
| 제조사 | 로봇 콘트롤러의 소프트웨어 버전 |
|---|---|
| 주식회사 WACOH-TECH | Ver.2.2.*이상 |
| ATI Industrial Automation | Ver.2.11.0이상 |
| 신토공업주식회사 | Ver.2.11.0이상 |
덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)