워크 좌표 원점을 중심으로 회전운동을 함으로써 대상물을 기준으로 한 티칭을 간단히 수행할 수 있습니다.
주요 사용 용도|디버링, 씰 도포제
대응 로봇|전기종
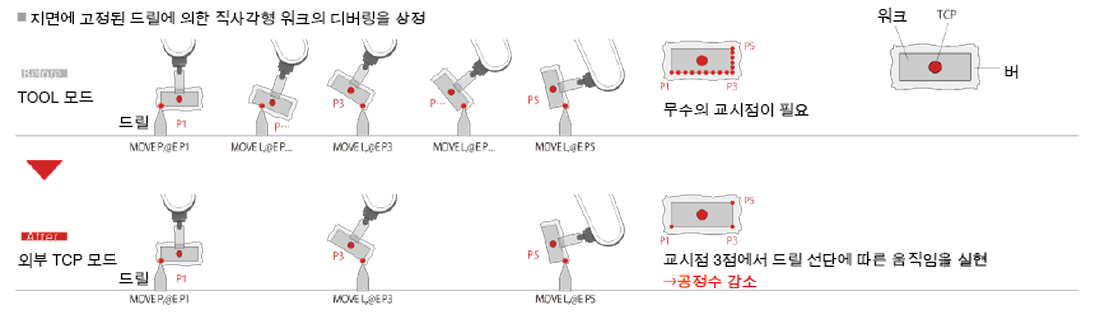
일반 수동 모드에서의 회전동작은 손끝 위치 좌표를 변경하지 않고 회전운동 합니다. 외부 TCP 기능을 사용하면 설정한 워크 좌표원점을 중심으로 회전운동을 할 수 있습니다.
외부 TCP 기능은 설비에 고정한 류터로 워크의 버제거를 할 때나 고정한 코킹 건으로 워크에 실 도포를 할 때 등 로봇이 워크를 가지고 CP 동작(직선, 원호)을 하고 싶을 때 교시점을 최소화할 수 있습니다.
덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)