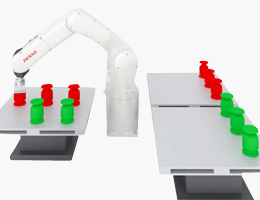
When the robot collides with a peripheral device or workpiece, this function detects the collision and brings the robot to an emergency stop.
Main applications|Prevents damage to the workpiece and hand caused by erroneous operation during teaching
By detecting a collision of the robot and tools that are attached to the hand with a peripheral device without using a special sensor to bring the robot to an emergency stop, this function reduces the damage caused by such collision. It can be used in both unattended and attended operations.









If you have not registered
The services on this member site are available only for registered customers.




































