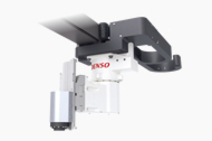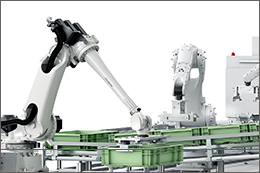
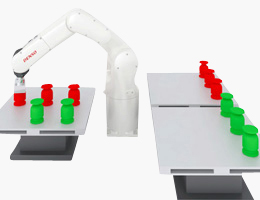
로봇이 주변기기나 워크와 충돌할 때 그 충돌을 검출하여 로봇을 긴급 정지시킵니다.
주요 사용 용도|티칭 오조작으로 인한 워크, 핸드 파손 방지
로봇 및 손끝 툴과 주변기기와의 충돌을 특별한 센서를 사용하지 않고 검출하여 로봇을 긴급정지시킴으로써 충돌로 인한 피해를 줄일 수 있는 기능입니다.
자동 운전 시, 수동 조작 시 모두 사용할 수 있습니다.










덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)