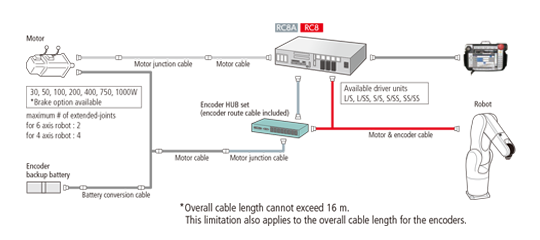
Extended joints can be controlled by the same interface as the robot. They can be easily adjusted using the Auto Gain Tuning function.
Main applications
Robot drive axis / servo hand, device to determine position
Supported Robots
Compatible RC8A and RC8 robots: All models

This function enables the robot controller to perform acceleration/deceleration of extended joints according to the default pattern preset in the controller. Based on the motion of the extended joints in that operation, the controller estimates the inertia of the payload and sets the appropriate gain automatically, making initial setup easy.
This function can keep the pressing force of the tip of the robot hand constant using a force sensor. Assembly, grinding and other work can be stable using this function.





If you have not registered
The services on this member site are available only for registered customers.




































