全国3会場とオンライン会場におきまして
デンソーロボット商品説明会「DENSO Robotics Expo 2022」を開催いたします。
本説明会では、待望の高速人協働ロボット「COBOTTA PRO」を世界初公開。
その他、最新のデモンストレーションを多数ご用意しております。
会期中はCOBOTTA PROの特長やデンソーロボットの最新事例をご紹介する
技術プレゼンテーションも開催します。
皆様のご来場を心よりお待ちしております。
-
 東京会場 2022年
東京会場 2022年
3月9日(水)~11日(金)
10:00~20:00
※最終日のみ~17:00
TFTビル 西館 TFTホール
-
 大阪会場 2022年
大阪会場 2022年
3月16日(水)~18日(金)
10:00~20:00
※最終日のみ~17:00
京セラドーム スカイホール
-
 愛知会場 2022年
愛知会場 2022年
3月23日(水)~25日(金)
10:00~20:00
※最終日のみ~17:00
刈谷産業振興センター あいおいホール
-
 オンライン会場 2022年
オンライン会場 2022年
3月3日(木) 11:00 ~ 31日(金)18:00
特設WEBサイトにて実施
※新型コロナウイルス感染症の感染拡大状況に応じて開催方法などを変更させていただく可能性があります。
会場で体感!
最新デモンストレーション
-
 COBOTTA PRO
COBOTTA PRO
生産性と安全性を両立した高速部品組立 高速人協働ロボット「COBOTTA PRO」の実機を世界初公開。COBOTTA PROによる部品の高速組立を行い、人と協働して分解します。

-
 COBOTTA PRO+AGV+
COBOTTA PRO+AGV+
Mech-Eye
小売商品ピッキング AGVに搭載されたCOBOTTA PROが、商品棚の商品を3Dビジョンカメラで認識しピッキング。オーダーに応じて商品を収集します。
-
 COBOTTA PRO
COBOTTA PRO
簡単+直感を追求した“使える”プログラミングシステム ビジュアルプログラミングと進化したダイレクトティーチングを組み合わせた、より簡単・直感的なプログラミングシステムを実演します。
-

-
 不定形部品の高精度ランダムピッキング AI搭載の3Dビジョンを活用。半透明の不定形柔軟物である部品をマスタレスで認識して高精度にピッキング・組立を行います。
不定形部品の高精度ランダムピッキング AI搭載の3Dビジョンを活用。半透明の不定形柔軟物である部品をマスタレスで認識して高精度にピッキング・組立を行います。
-
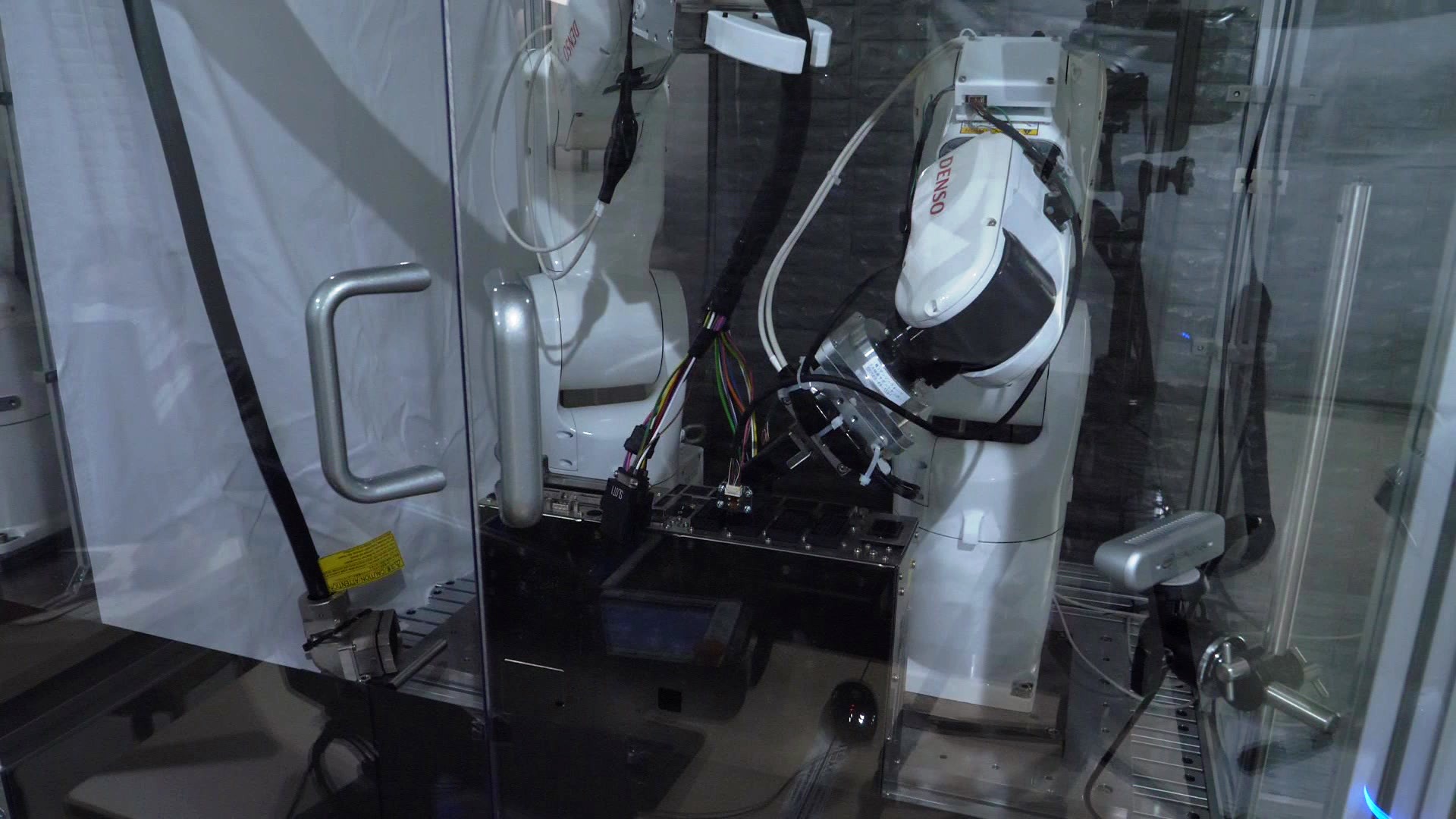 AI模倣学習によるハーネス組付 AI模倣学習と2台のロボットで、今まで自動化が困難だった不定形軟体物であるハーネスのコネクタへの差込みを実演します。
AI模倣学習によるハーネス組付 AI模倣学習と2台のロボットで、今まで自動化が困難だった不定形軟体物であるハーネスのコネクタへの差込みを実演します。
-
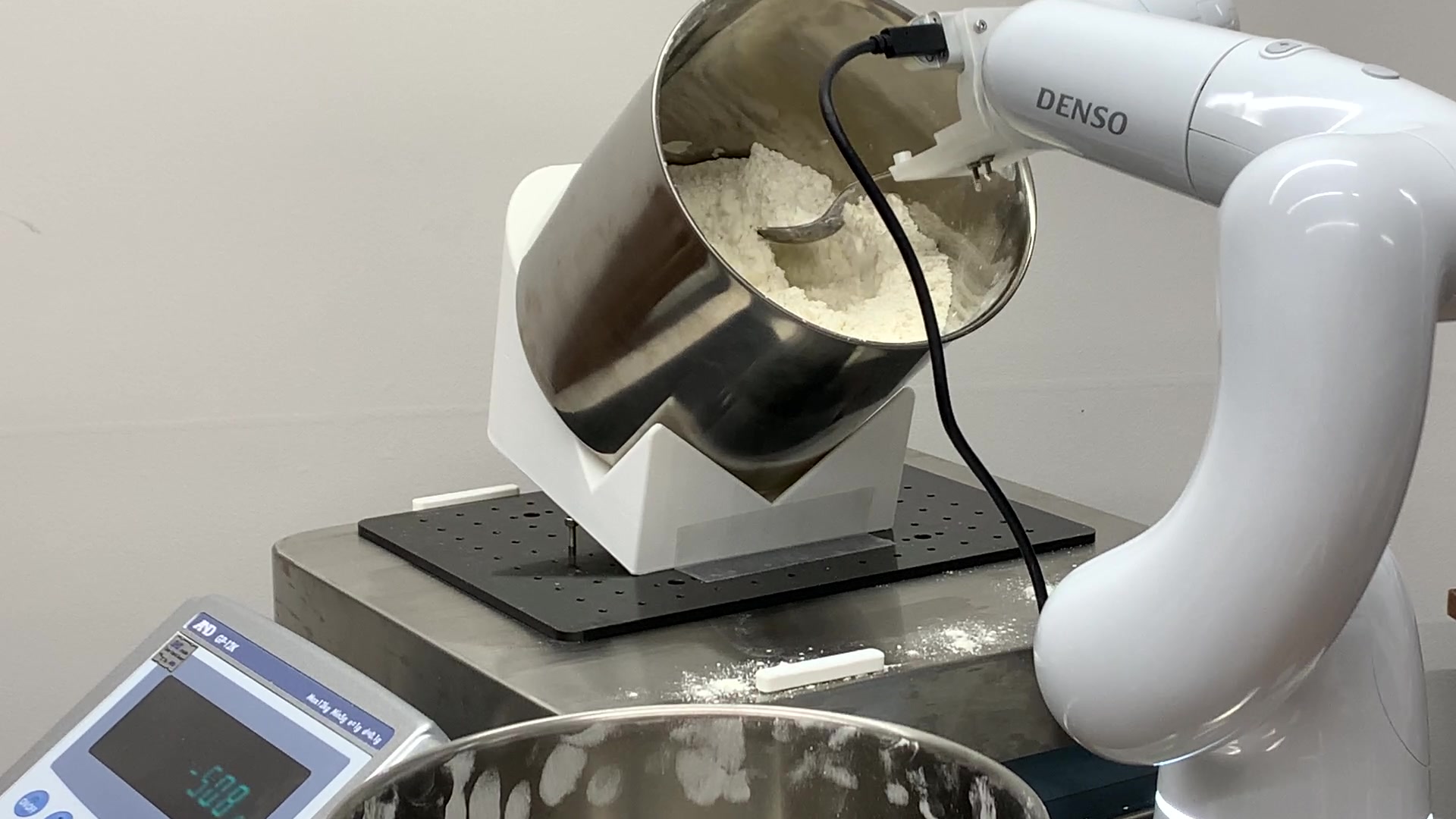 AI模倣学習による粉体秤量
AI模倣学習による粉体秤量
形や密度が変化して自動化が難しかった粉体の秤量を、AI模倣学習を使うことで実現しました。
-
 AI模倣学習による液体秤量
AI模倣学習による液体秤量
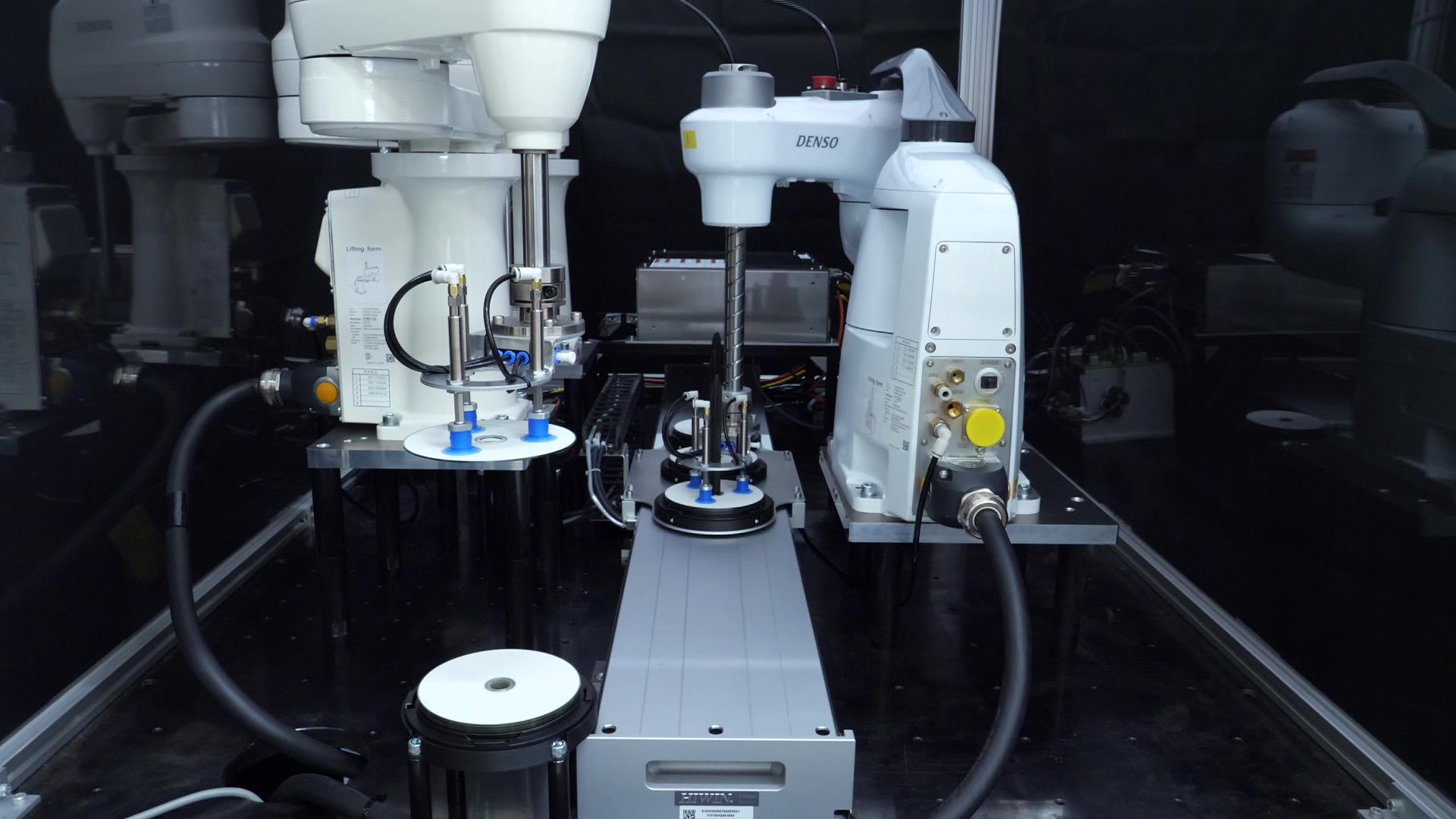
密度や粘性が異なる液体の秤量作業を実現。AI模倣学習専用GUIを使ってデータ取得や学習も簡単に実行できます。
-
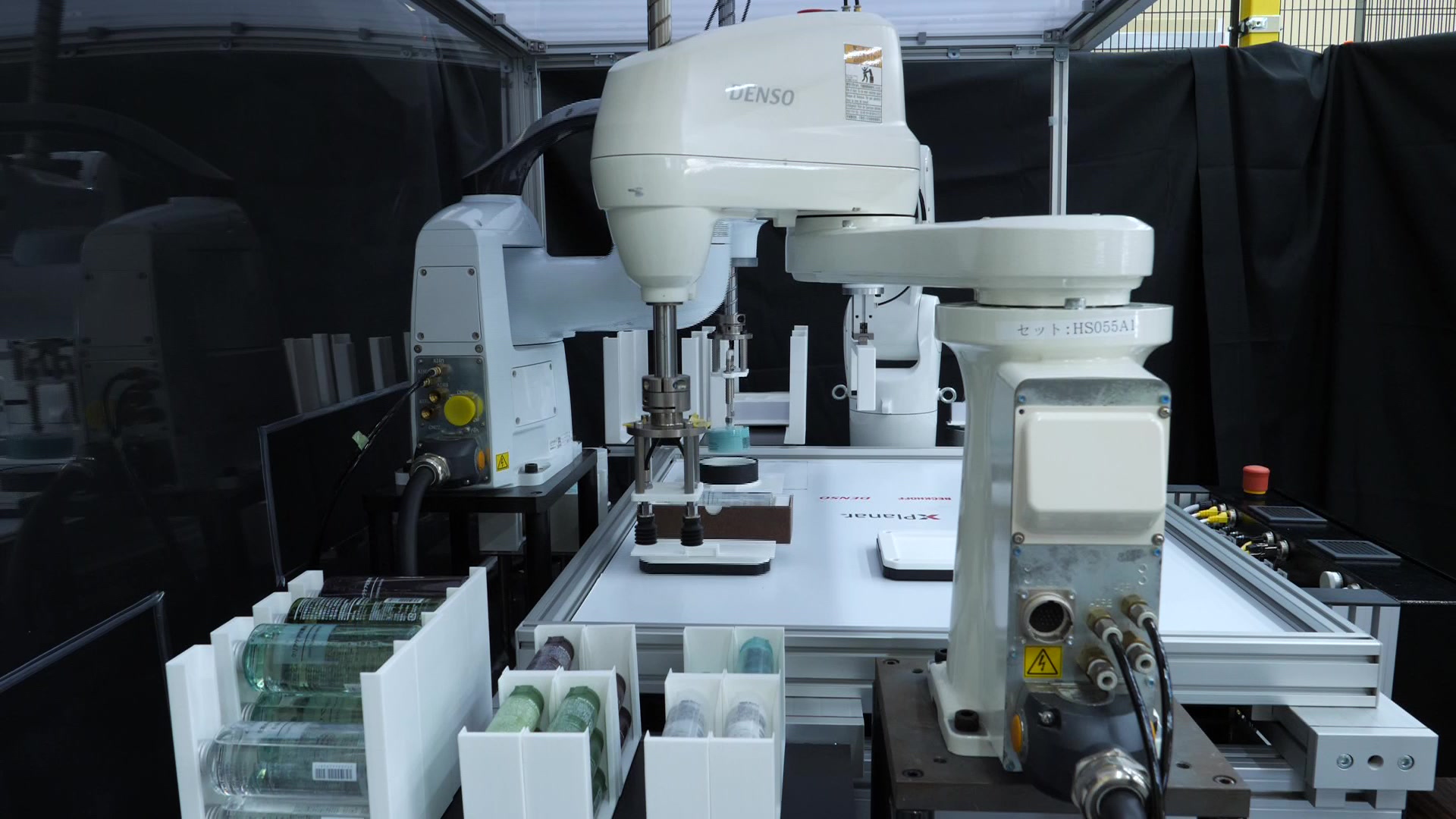 RC9+Xplanar 同期制御による高速化粧品梱包 RC9と浮遊搬送システム「Xplanar」を組み合わせることで、多品種少量生産に対応できる梱包作業の自動化を実現しました。
RC9+Xplanar 同期制御による高速化粧品梱包 RC9と浮遊搬送システム「Xplanar」を組み合わせることで、多品種少量生産に対応できる梱包作業の自動化を実現しました。
-
 インテリジェントグリッパを使った陳列 ロボットアームと同時制御できる「インテリジェントグリッパ」を使ってサンドイッチを陳列。“止めない制御”を実現します。
インテリジェントグリッパを使った陳列 ロボットアームと同時制御できる「インテリジェントグリッパ」を使ってサンドイッチを陳列。“止めない制御”を実現します。
-
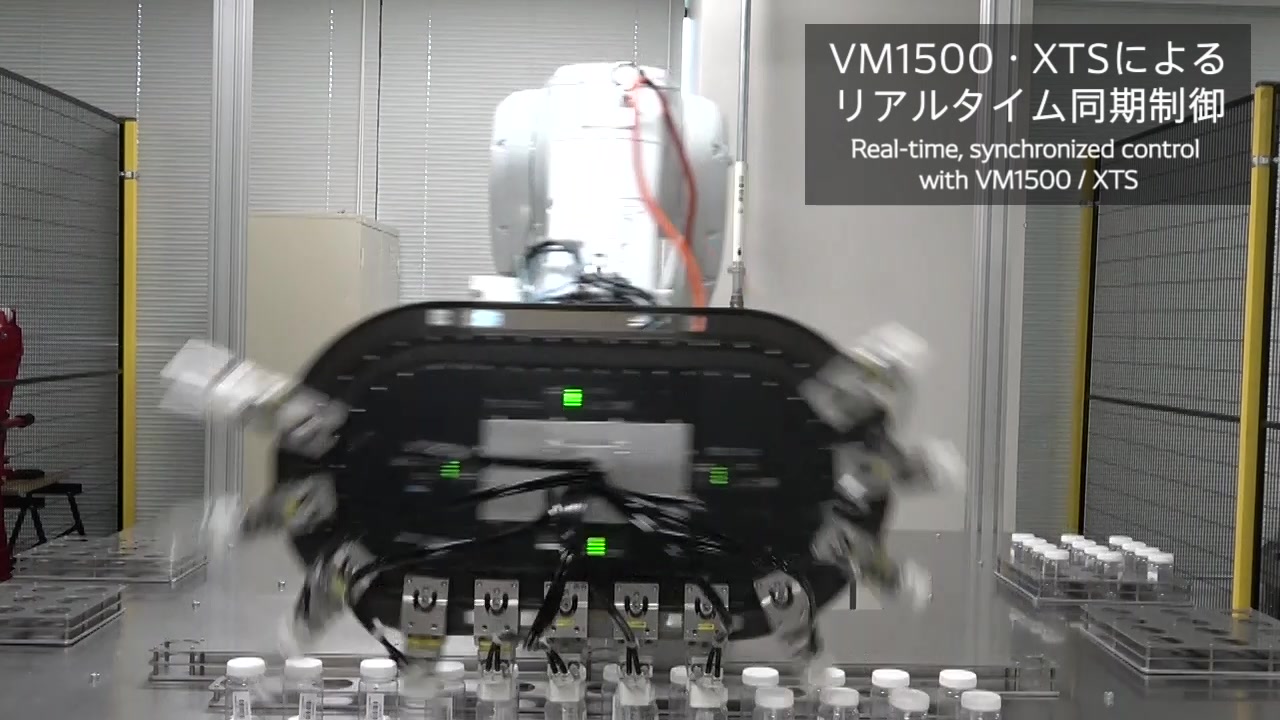
 電子カムを活用した高速ワーク整列 電子カムによる複数台ロボットのリアルタイム同期制御で高速なワーク整列を実現。生産量の変動にも即座に対応可能です。
電子カムを活用した高速ワーク整列 電子カムによる複数台ロボットのリアルタイム同期制御で高速なワーク整列を実現。生産量の変動にも即座に対応可能です。
-
 高可搬・ロングリーチ
高可搬・ロングリーチ
VMBシリーズ 搬送作業やパレタイジング作業に最適な高可搬・ロングリーチロボット「VMB」シリーズを展示します。
-
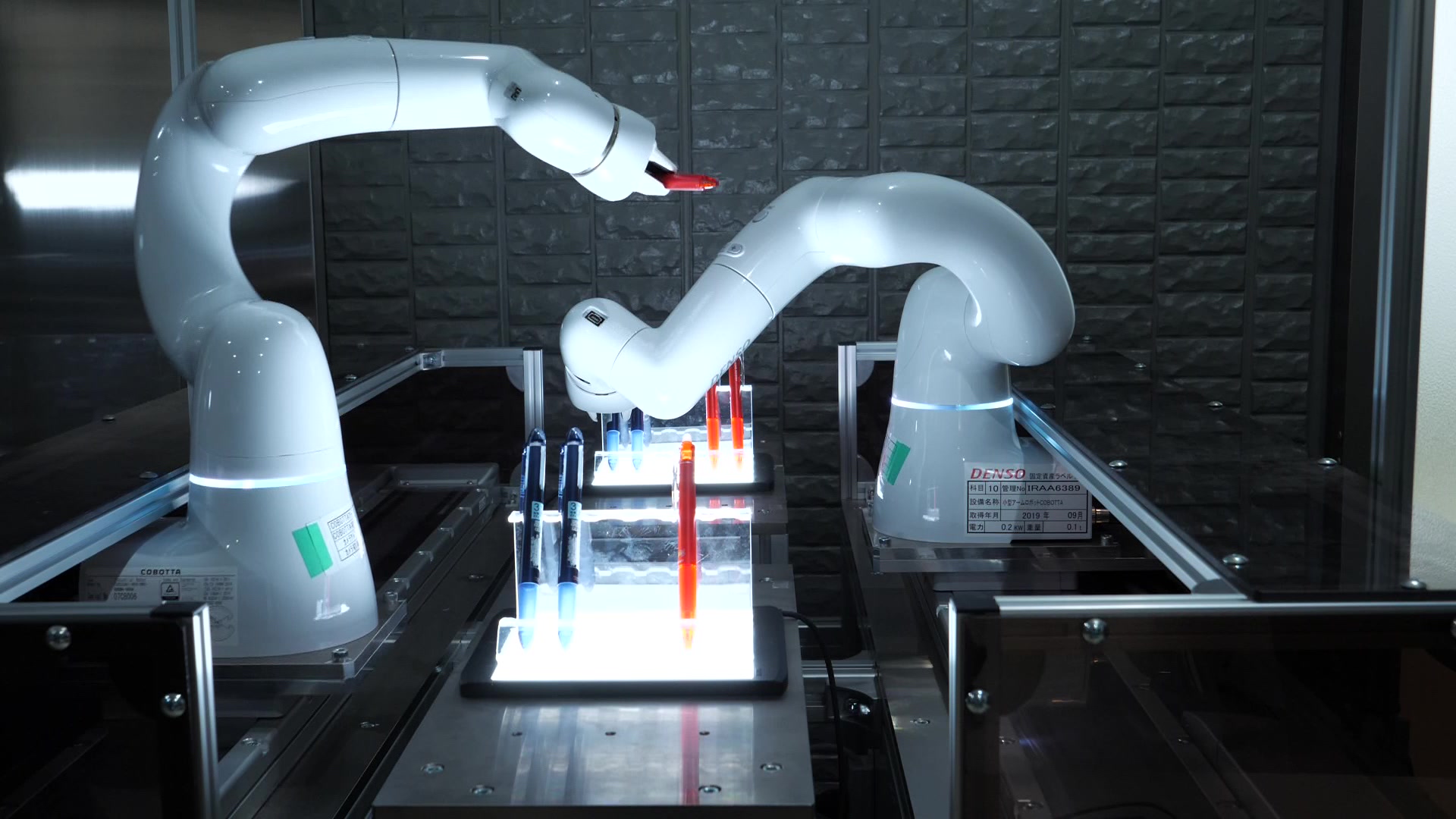 最適経路計画によるペンピッキング 動的な「最適経路計画」を使い、COBOTTA同士が干渉しない経路をプログラミングレスで作成しながらペンピッキングを行います。
最適経路計画によるペンピッキング 動的な「最適経路計画」を使い、COBOTTA同士が干渉しない経路をプログラミングレスで作成しながらペンピッキングを行います。
-
 VR技術を活用 ロボットトレーニング・工場見学 ロボットトレーニングや弊社工場の見学コースをVR化しました。この貴重な機会にぜひ会場でご体感ください。
VR技術を活用 ロボットトレーニング・工場見学 ロボットトレーニングや弊社工場の見学コースをVR化しました。この貴重な機会にぜひ会場でご体感ください。
-
 【愛知会場限定】デンソーウェーブ工場見学ツアー 普段は入れない工場で、デンソーロボットの活用事例を間近でご覧いただけます。
【愛知会場限定】デンソーウェーブ工場見学ツアー 普段は入れない工場で、デンソーロボットの活用事例を間近でご覧いただけます。
> 詳細はこちら
-
※掲示内容は一部になります。
また、変更になる可能性があります。
エンジニアが直接解説!
最新技術セミナーが満載
- 1
-
高速協働ロボット「COBOTTA PRO」はいかにして生まれたのか?
協働ロボットは安全のために生産性向上のための高速性能を犠牲にしないといけないの?協働ロボットの特徴の一つである「簡単操作,簡単プログラミング」はどのようなアプリケーションで使えるの?協働ロボットだけで人が行っていた作業の置き換えは可能なの?COBOTTA PROの開発背景とコンセプトは、このような疑問への答えに繋がります。
- 2
-
COBOTTA PRO - 生産性と安全性の両立
非協働時は、最大TCP速度2,500mm/sで稼働するCOBOTTA PRO。各軸に標準搭載した独自のトルクセンサに加え、トルク・速度・エリア監視などの機能安全により、作業者の安全を守ります。また、シリコン緩衝材に高感度接触センサを組み込んだタッチセンシングソフトカバーを装着することにより、さらに衝突時のリスクを低減でき、安全に生産性を向上することができます。
- 3
-
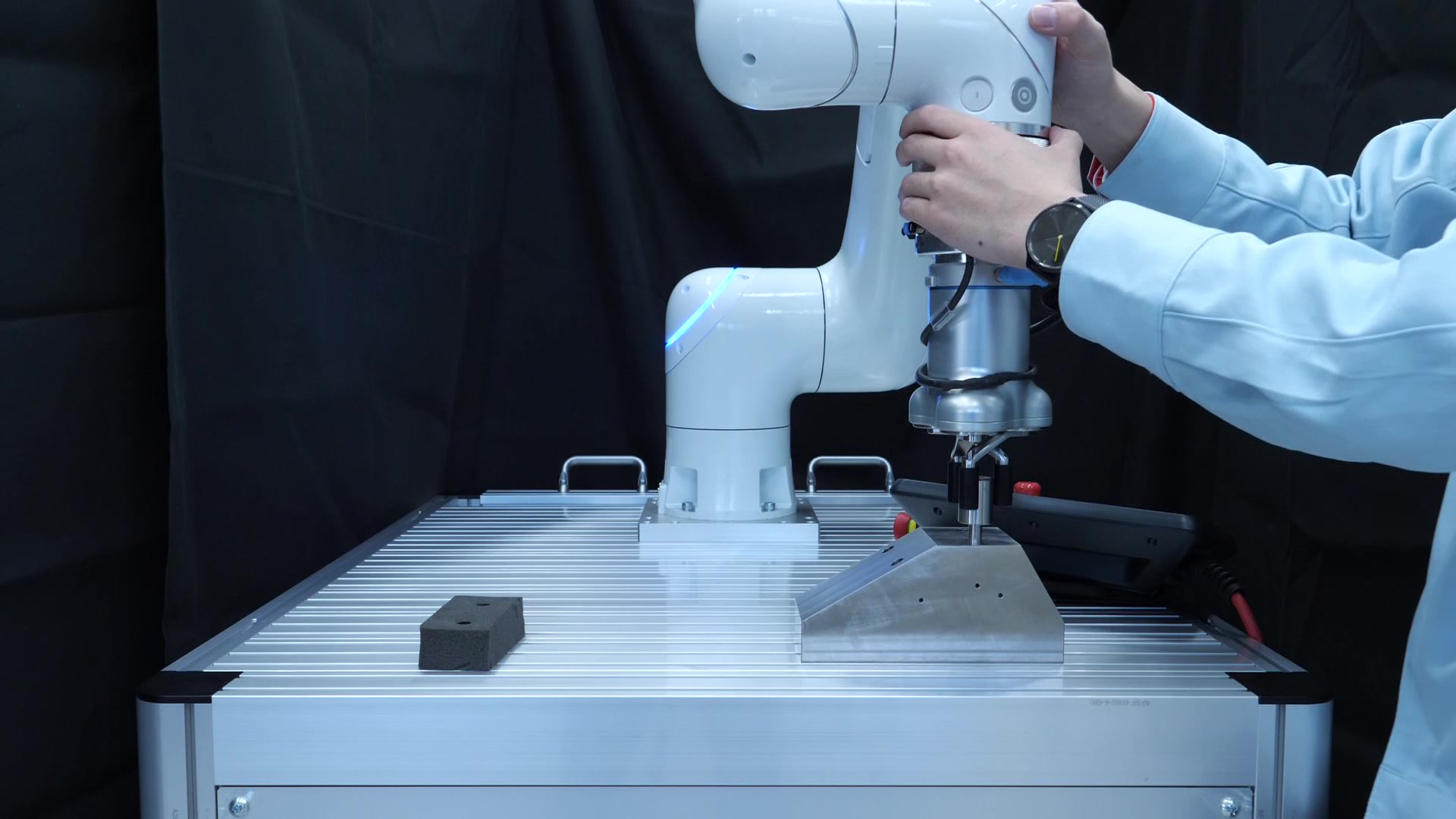
COBOTTA PRO - 簡単+直感を追究した”使える”プログラミングシステム
高難度の作業を誰でも直感的にティーチングできるように、動作方向の拘束、動作の重さの設定等、ダイレクトティーチングをサポートする機能を充実させました。また、新開発のビジュアルプログラミング言語と連携し、シームレスにティーチングとプログラミングを行える新しいプログラミングシステムをご紹介します。
- 4
-
RC9リアルタイム統合制御とインテリジェントグリッパによる“止まらないロボット“の実現
フレキシブル電動ハンドと、高速・高精度で距離・角度を認識できる近接覚センサを組合せた次世代のロボットハンド“インテリジェントグリッパ”を開発しました。RC9によってロボットアームとインテリジェントグリッパをリアルタイム統合制御することで、今まで実現できなかった新たなアプリケーションの可能性を紹介します。
- 5
-
統合コントローラRC9 × Xplanarによるマスカスタマイゼーションの実現
新型コントローラRC9は、RC8の上位互換機として開発し、よりパワフルな開発環境をお客様に提供するべくBeckhoff Automation社のTwinCATをプラットフォームに採用しています。今回は、統合コントローラとしてのRC9とBeckhoff Automation社の浮遊型リニア搬送システム「Xplanar」を使いリアルタイム同期制御を実現、マスカスタマイゼーション可能なデモ機の全貌をご紹介します。
- 6
-
RC9による統合制御のメリット
現在ロボットシステムは、システムを構築する各デバイスが各々の開発環境・制御方法によって独立で機能する分散制御が主流です。デバイス毎に異なる開発環境は開発費を拡大させ、独立した制御が設備全体の動作を分断することでサイクルタイムが延びることが課題となっています。 RC9の統合制御による、エンジニアリング費の低減と高速同期制御の実現を事例にてご紹介します。
- 7
-
AI模倣学習による不定形・軟体物を取り扱う工程の自動化
AI模倣学習を使用することで、今まで自動化できなかった不定形・軟体物を取り扱う自動化を実現することができます。今回はAI模倣学習の製品概要から導入のイメージ、デモ機のご紹介、トレーニングデータ取得の工夫まで、AI模倣学習に関する疑問を詳しくご紹介していきます。
- 8
-
3DビジョンMech-EyeのAI認識による不定形物ピッキングの技術解説
AIビジョンは認識率が高くロバスト性がある代わりに、FAで求められる精度には満たないという課題がありました。 Mech-EyeはAIの高性能な認識に加え、必要な場面では従来型のルールベースの画像処理を追加することで高認識+高精度の両方を実現します。 実際のデモ機を例に、従来製品では実現しなかった難作業に対しMech-Eyeをどのように活用しているかご紹介します。
※掲示内容は一部になります。
また、変更になる可能性があります。
豪華講師陣による技術講演
オンライン会場でのライブ配信が決定!
各会場の特別講演をオンライン会場限定でリアルタイムにご覧いただけます。
当日のご来場が難しい方は、ぜひオンラインで特別講演をご視聴ください。
- AI活用の最新事例およびOmniverseを活用したデジタル
ツインの紹介
エヌビディア合同会社
オートノマスマシン事業部
ビジネス推進マネージャー
梅本 将範 氏
[ 東京会場 ][ オンライン会場 ]
3月9日(水)17:35~
GPUはグラフィックの処理だけでなく、物理シミュレーション、AI、自動運転、ロボティクスに至るまで幅広く活用されております。 まず、様々な業界で活用されているAIの事例を製造業中心にご紹介します。そして、NVIDIAがこれから注力していくプラットフォームのうちの一つであるOmniverseの説明を致します。NVIDIAが得意としているフォトリアルなグラフィックによるバーチャル空間上で、物理シミュレーションやAIを使って設計を行っていく世界観を共有します。
- 深層予測学習によるロボットの
知能化コンセプトと事例
早稲田大学 理工学術院
基幹理工学部 教授
尾形 哲也 氏
[ 大阪会場 ][ オンライン会場 ]
3月17日(木)17:35~
本講演では、身体知能を実現するために筆者らが提案している深層予測学習の概要、この技術を用いた複数企業との共同研究事例や最新の研究成果を紹介する。またムーンショットプロジェクトAIRECプロジェクトの概要についても紹介する。
- 触覚機能を内包する高速・高精度近接覚センサ
大阪大学大学院基礎工学研究科
システム創成専攻 原田研究室 助教
小山 佳祐 氏
[ 大阪会場 ][ オンライン会場 ]
3月16日(水)17:35~
[ 愛知会場 ][ オンライン会場 ]
3月23日(水)17:35~
ロボティクスにおけるメジャーなセンシング技術は3次元カメラや力覚センサであるが、今なお認識誤差や高速制御時の安定性に関する未解決の問題がある。� 私の研究ではこれらの問題を解決するために、ロボット表面から非接触で物体を検知する 「近接覚センサ」の導入を提案している。 �本講演では近接覚センサの応用例について紹介する。
※掲示内容は一部になります。
また、変更になる可能性があります。
※技術講演のライブ視聴にはZoomを使用します。
新型コロナウイルス感染防止のため、徹底した感染対策を実施いたします。
●事前予約制により入場制限を実施いたします。
●入場時に検温と手指消毒を実施いたします。
●スタッフはマスクを着用いたします。来場者にもマスクの着用をお願いします。
●扉の解放・空調設備などによって適宜会場内の換気を実施いたします。
●適宜会場内デモ機等の消毒を実施いたします。