















































デンソーウェーブ プライベートショー 2016 ご来場ありがとうございました。2016年7月28日(木)から7月29日(金)まで、刈谷市産業振興センター あいおいホールにて開催されました。
多数ご来場いただき、誠にありがとうございました。

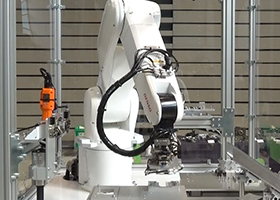
直交3軸+⼿⾸3軸による三次元座標を持つ、RC8コントローラを活⽤したオリジナルロボット
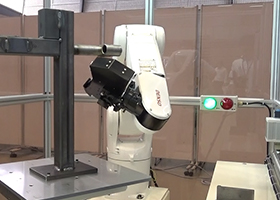
⾃由度の⾼い6軸ロボットに3Dカメラヘッドを取り付け、溶接ビードを三次元測定し、⾃動検査が可能。

ロボットコントローラで締付けトルクを⾃動制御し、三次元で⾼速・⾼精度のねじ締めを実現
ロボットが無停止で多数の検査を行い、大幅な時間短縮が可能。
検査の自動化により品質の安定、トレーサビリティーを確保。

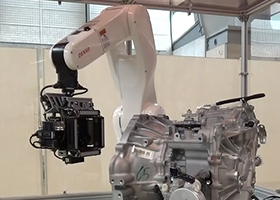
6軸ロボットの⾃由度と独⾃の光学系・画像処理ソフトを組み合わせ、⽬視を凌駕する⾼速外観検査を実現。

3次元CAD/CAMデータによりロボットの軌跡を⽣成し、教⽰レスでリアルタイムの倣い作業を実現。

ロボットピッキングと画像処理機能内蔵カメラによる外観検査を組み合わせた⾃動化を実現

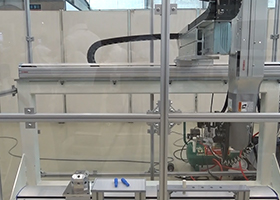
前⾯⾛⾏ローダーと⾼さ1600以下のマシニングセンタとの組み合わせにより、加⼯ラインの⾒える化を実現
ツールチェンジャーによってロボットハンドを短時間で自動交換でき、組み付けや搬送などの異なる作業を一台のロボットで実現

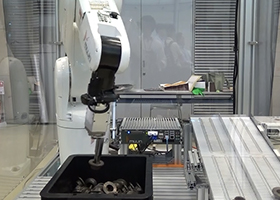
EYEFEEDER(2軸振動型フィーダー)と汎用ビジョンシステムを組み合わせてボルトの径・長さを識別し、仕分けが可能

リニア搬送システム・カメラ・三次元形状計測・ロボットの⾼い汎⽤性を活かした柔軟なライン構築を実現

⾃由度の⾼い6軸ロボットを⽤いて、⾮接触での上下横斜め⽅向からの⾼速シーリングにより⽣産性の向上を実現

レーザはんだ付けユニットとロボットの組み合わせにより、高密度実装、安定したはんだ付け、フレキシブルな自動化を実現
3Dビジョンとリアルタイム干渉回避機能によりティーチングレスでのバラ積みピッキングを実現

2D変位センサからの加工解析を用いたランダムピッキングと2Dカメラでは難しい傷、異物検査を高い精度で実現

基本性能を追求し、速く動き始める・速く動き続ける・正確に止まる「本物の高速性」を実現
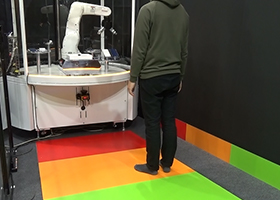
安全と高生産性の両立
停止監視により動力遮断せずに待機し、人が離れた時にロボットがすぐに作業復帰
ロボットと周辺設備との干渉回避を容易に実現
複数台のロボットが侵入できるエリアにおいて、同時侵入を自動で制限

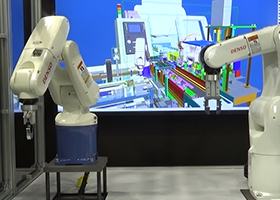
協調制御機能により高難度な組立・搬送作業を自動化
複数台ロボットのプログラミングを1台のコントローラに集約することにより、容易に一元管理可
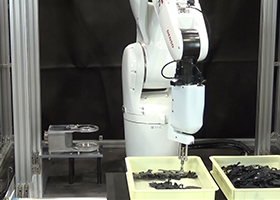
キヤノン製 高性能3Dマシンビジョンにより多様な部品を高速・高精度に3次元認識し、高速且つ取り残しのないランダムピッキングを実現
