





























感谢您光临“DENSOWAVE PRIVATE SHOW 2016.”2016年7月28日(木)至29日(五)“DENSOWAVE PRIVATE SHOW 2016.”在刈谷市产业振兴中心举办。
非常感谢大家光临我司的展示会。


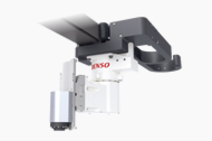
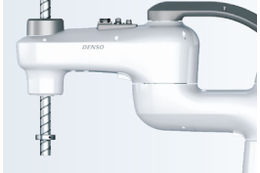
拥有正交3轴+手腕3轴的三维坐标、
可使用RC8控制器操控的原创机器人
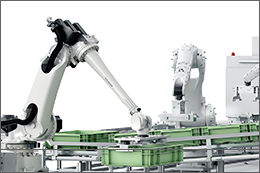
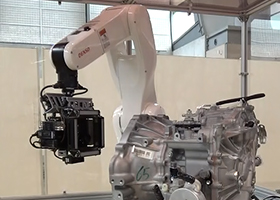
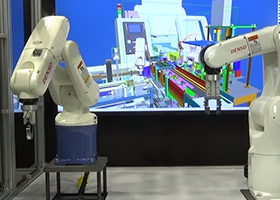
高自由度的6轴机器人上安装3D摄像头,
可对焊珠进行三维测量,能够进行自动检查。

通过机器人控制器自动控制拧紧扭矩,实现三维化的高速、高精度的螺丝紧固作业
机器人无间断地执行多个检查,可大幅度地缩减时间。
通过自动化检查确保稳定的品质和可跟踪性。

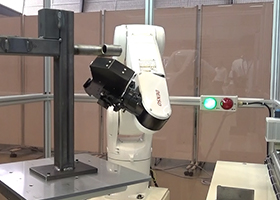
结合6轴机器人的自由度与独有的光学图像处理软件,实现超越目测的高速外观检查。

使用三维CAD/CAM数据生成机器人的轨迹,实现无示教的实时仿形作业。

实现了结合机器人拣选和使用内置图像处理功能摄像机的外观检查功能的自动化

结合前方移动装载机和高度在1600以下的加工中心,实现加工线的可视化
通过工具快换装置,可在短时间内自动更换机械手,实现由1台机器人完成组装、搬运等各项作业

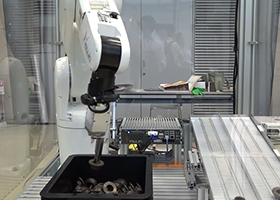
结合EYEFEEDER(2轴振动式送料机)和通用视觉系统,
可识别螺栓的直径和长度,以进行分类

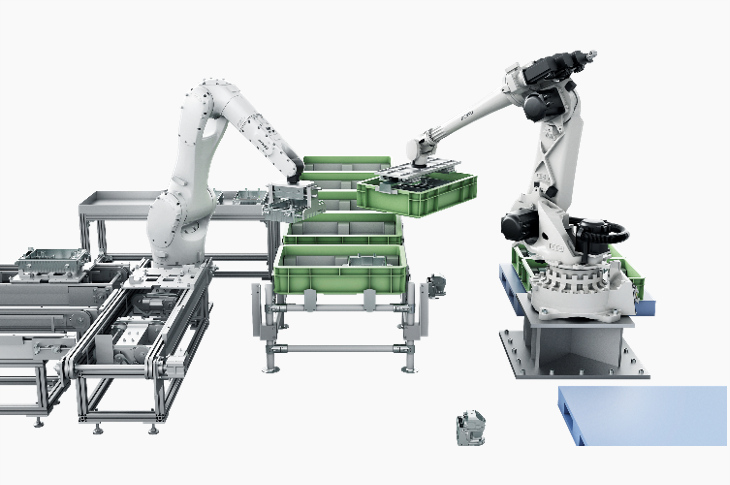
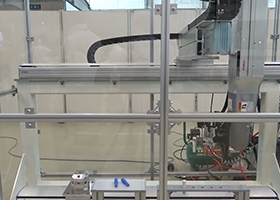
充分利用机器人的高通用性,与线性搬运系统、摄像机、三维形状测量相结合,构建灵活的作业线

使用高自由度的6轴机器人,从上下、横向、斜向进行非接触式高速密封,实现生产力的提高

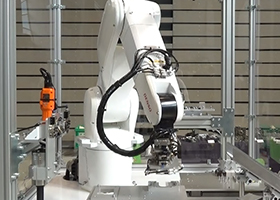
结合激光焊接单元和机器人,实现高密度的安装、稳定的焊接和灵活的自动化
通过3D视觉和实时干扰回避功能,实现无示教的散装拣选

通过对2D变位传感器的数据进行加工和解析,高精度实现随机拣选和2D摄像机难以做到的缺陷及异物检查

讲究基本性能,实现“真正的高速”
快速启动、持续快速工作、正确停止
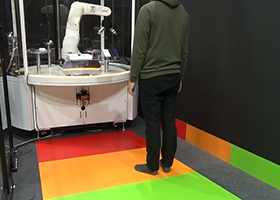
兼顾安全与高生产效率
通过停止监视功能,在不切断动力的情况下待机 人离开后,机器人立即恢复作业
可简单避免机器人与外围设备间的干扰
在多台机器人可进入的区域,自动限制同时进入

通过协作控制功能,实现高难度组装、搬运作业的自动化
将多台机器人的编程集结到1台控制器中,轻松实现一体化管理

利用佳能的高性能3D机器视觉系统,对各种部件进行高速、高精度的三维识别
实现高速且无残留的随机拣选
为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)
