
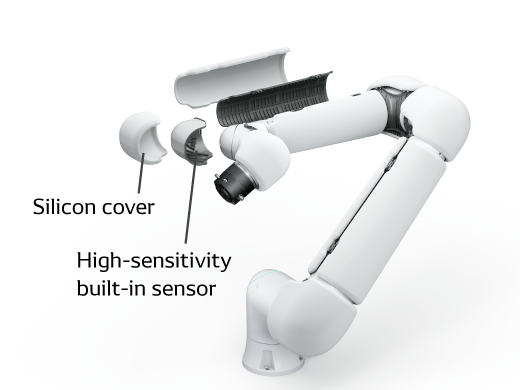
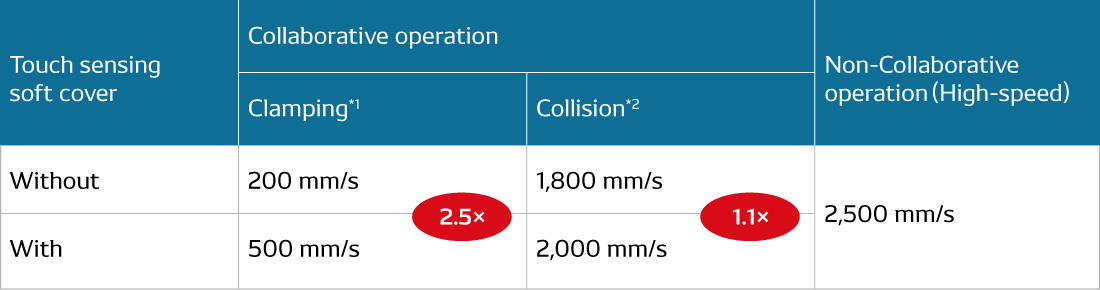
Attaching this high-sensitivity soft cover increases the speed of collaborative operation to allow higher productivity.
This cover is designed to be fitted to COBOTTA PRO. Attaching this high-sensitivity soft cover increases the speed of collaborative operation to allow higher productivity. Models that cover the end effector are also available.
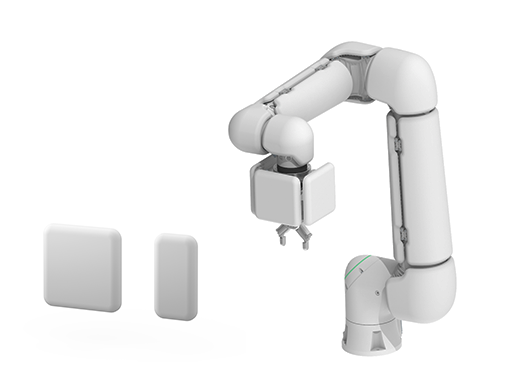
We offer end effector covers in two sizes. Choose the one that best suits your end effector’s shape. While the RLO function is effective if there’s only one sharp area, you can avoid high-force collisions involving an end effector with numerous sharp areas by covering it with an end effector cover. The cover incorporates a contact sensor, allowing it to stop the robot if it detects a collision.
| Full set | Half set | End effector cover | |
|---|---|---|---|
 |
 |
 |
|
| Weight | COBOTTA PRO 900:Approx. 6kg COBOTTA PRO 1300:Approx. 9kg |
COBOTTA PRO 900:Approx. 3kg COBOTTA PRO 1300:Approx. 4kg |
Small:240g Large:450g Flange general-purpose bracket:170g *Requires separate fabrication by the customer of a bracket to cover the hand. |
| Dimensions | ― | ― | Small:80×160mm Large:160×160mm |
| Detection time | 5 ms or less | ||
| Detected force | 10N | ||
| Operating environment temperature | 5°C to 45°C | ||
| Operating environment humidity | 20% to 80% RH (non-condensing) | ||
| Environmental resistance | IP54 *Avoid use in environments where the product would be exposed to oil or chemical substances. | ||
| Safety performance | PL d, Cat.3 | ||
| Certified standard compliance | EN ISO 13849-1:2015, EN ISO 13856-3:2013 | ||
If you have not registered
The services on this member site are available only for registered customers.





































