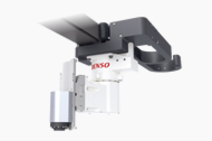
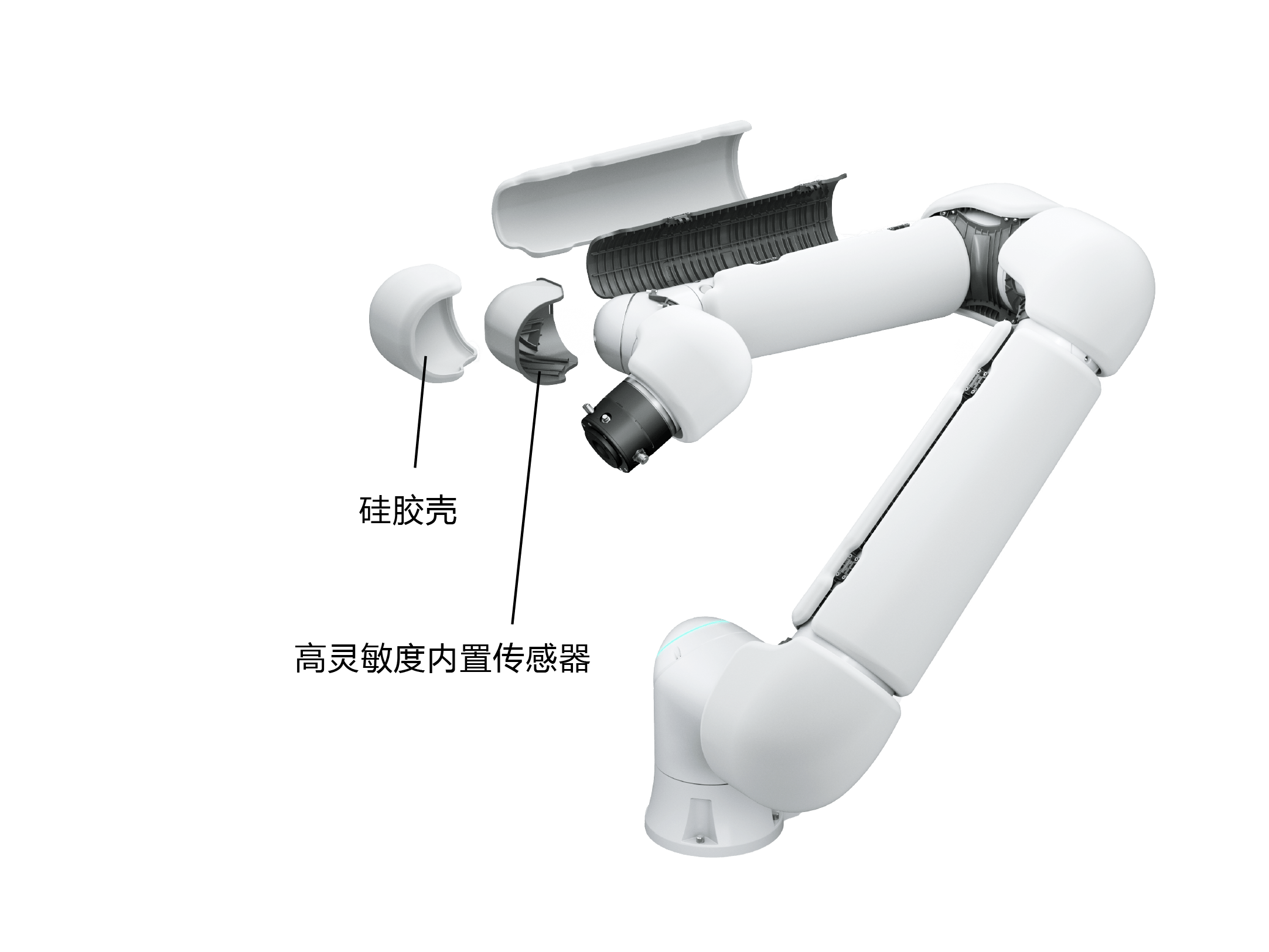
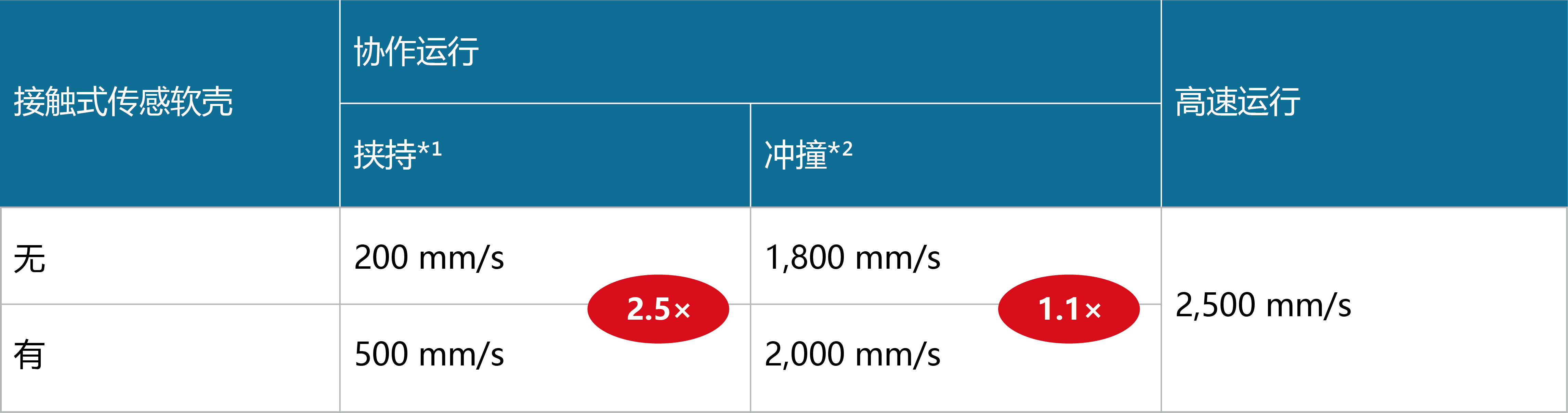
装在COBOTTA PRO机体上的外壳。安装高灵敏度的软壳,可提升协作运行时的速度,达到更高的生产效率。
即便全部安装,与通用性的软壳相比,也是非常纤细。有着柔软硅胶部分与高灵敏度内置传感器的双重结构。一旦检测到冲撞,内置传感器就会高速做出反应,紧急停止机器人。利用软壳吸收冲击,可减少对人的冲击力。硅胶部分设计为凸起,在实现高灵敏度的同时,提升缓冲性能。带来的是可通过装备软壳,提升协作运行时的速度。当然,COBOTTA PRO即便没有软壳,也可以作为协作机器人使用。
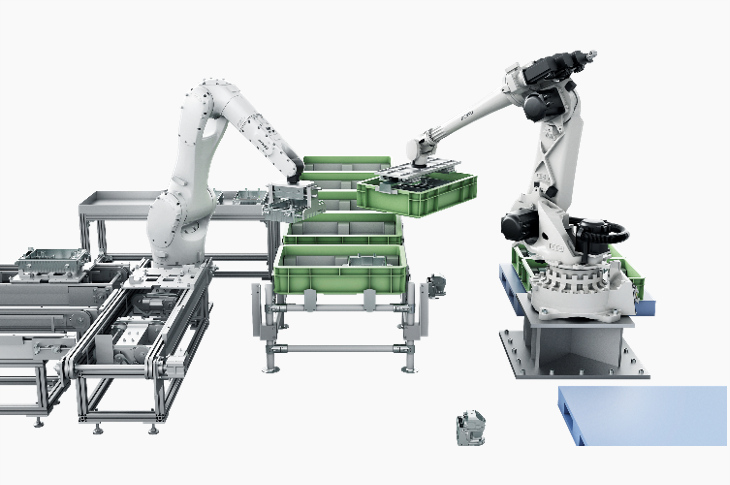
有两种不同尺寸的末端执行器用壳。请根据末端执行器的形状选择使用。只要有一处锐利部位,RLO功能就会生效,但锐利部位较多时,可装上末端执行器用壳,以可避免高压力带来的冲撞。由于搭载了接触式传感器,所以能监测冲撞,停止机器人。
| 全套 | 半套 | 末端执行器用 | |
|---|---|---|---|
| 外观 |
 |
 |
 |
| 重量 | COBOTTA PRO 900:约6kg COBOTTA PRO 1300:约 9kg |
COBOTTA PRO 900:约3kg COBOTTA PRO 1300:约4kg |
小:240g 大:450g 法兰通用支架:170g *客户需另行制作覆盖机械手的支架。 |
| 尺寸 | ― | ― | 小:80×160mm 大:160×160mm |
| 检测时间 | 5 ms以下 | ||
| 检测力度 | 10N | ||
| 使用环境温度 | 5 ℃~45 ℃ | ||
| 使用环境湿度 | 20~80 %RH无凝结 | ||
| 耐环境 | IP54 *请避免有油或化学品附着的环境。 | ||
| 安全性能 | PL d, Cat. 3 | ||
| 认证标准 | EN ISO 13849-1:2015 EN ISO 13856-3:2013 |
||
为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)