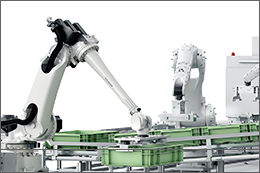
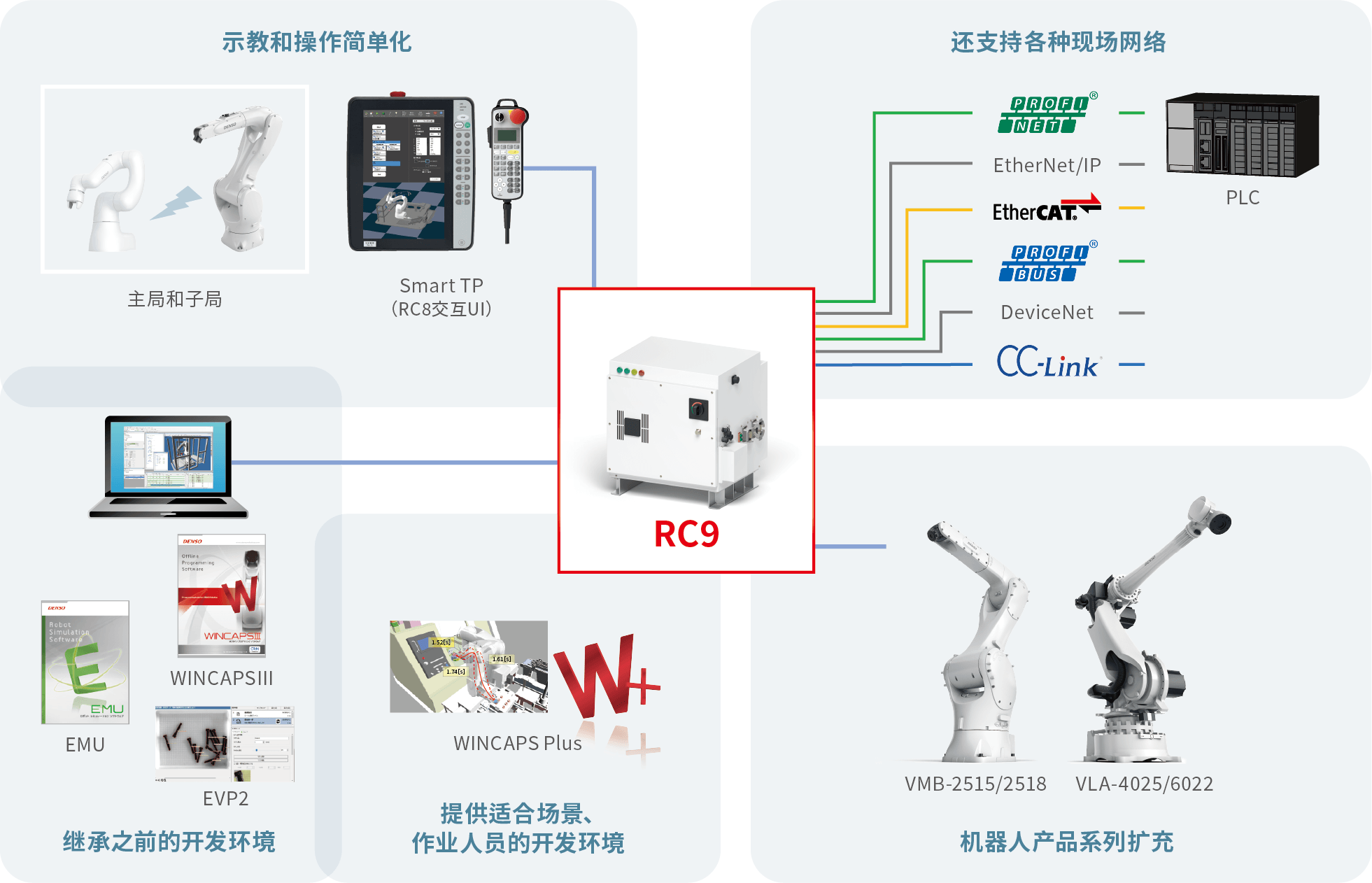
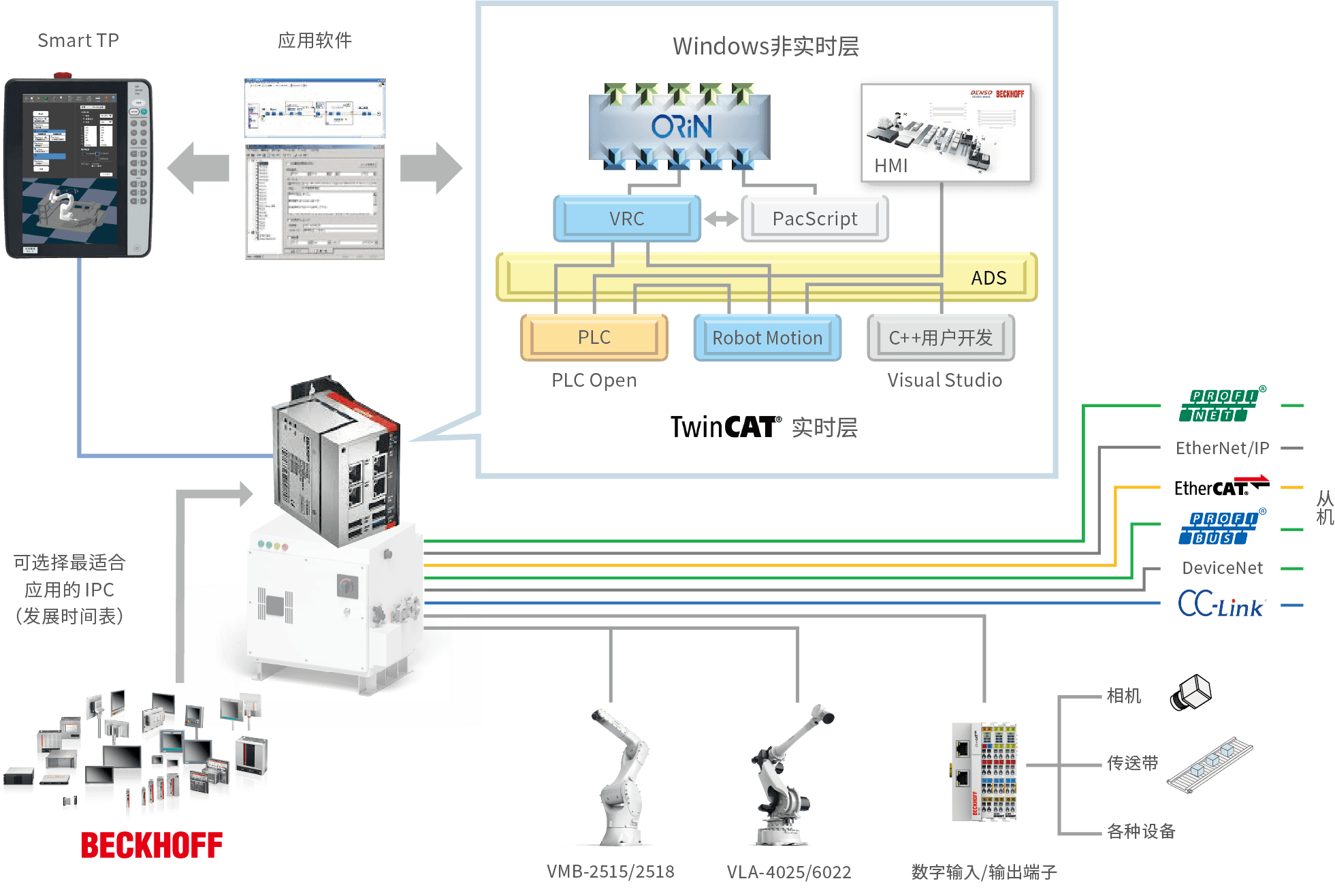
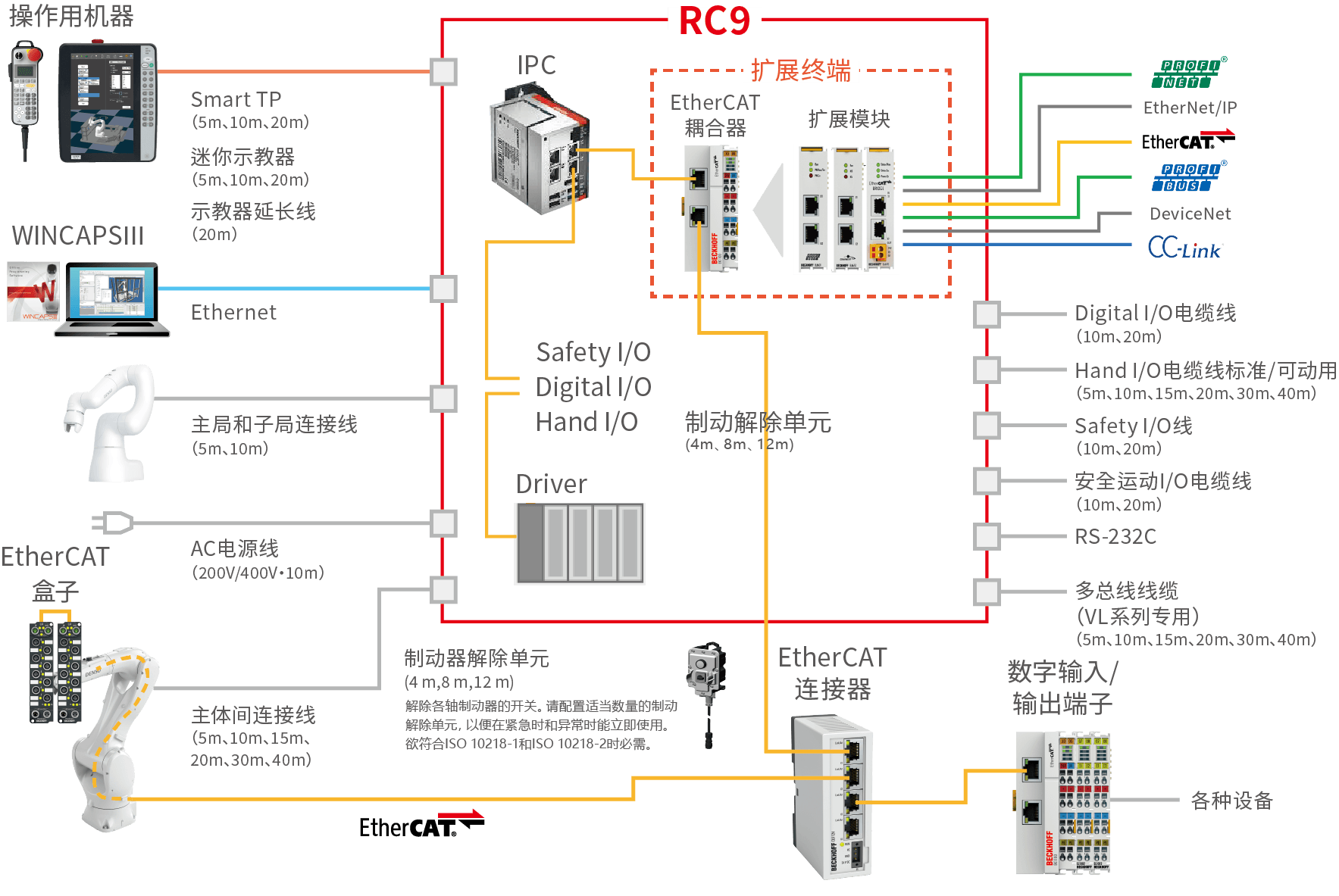
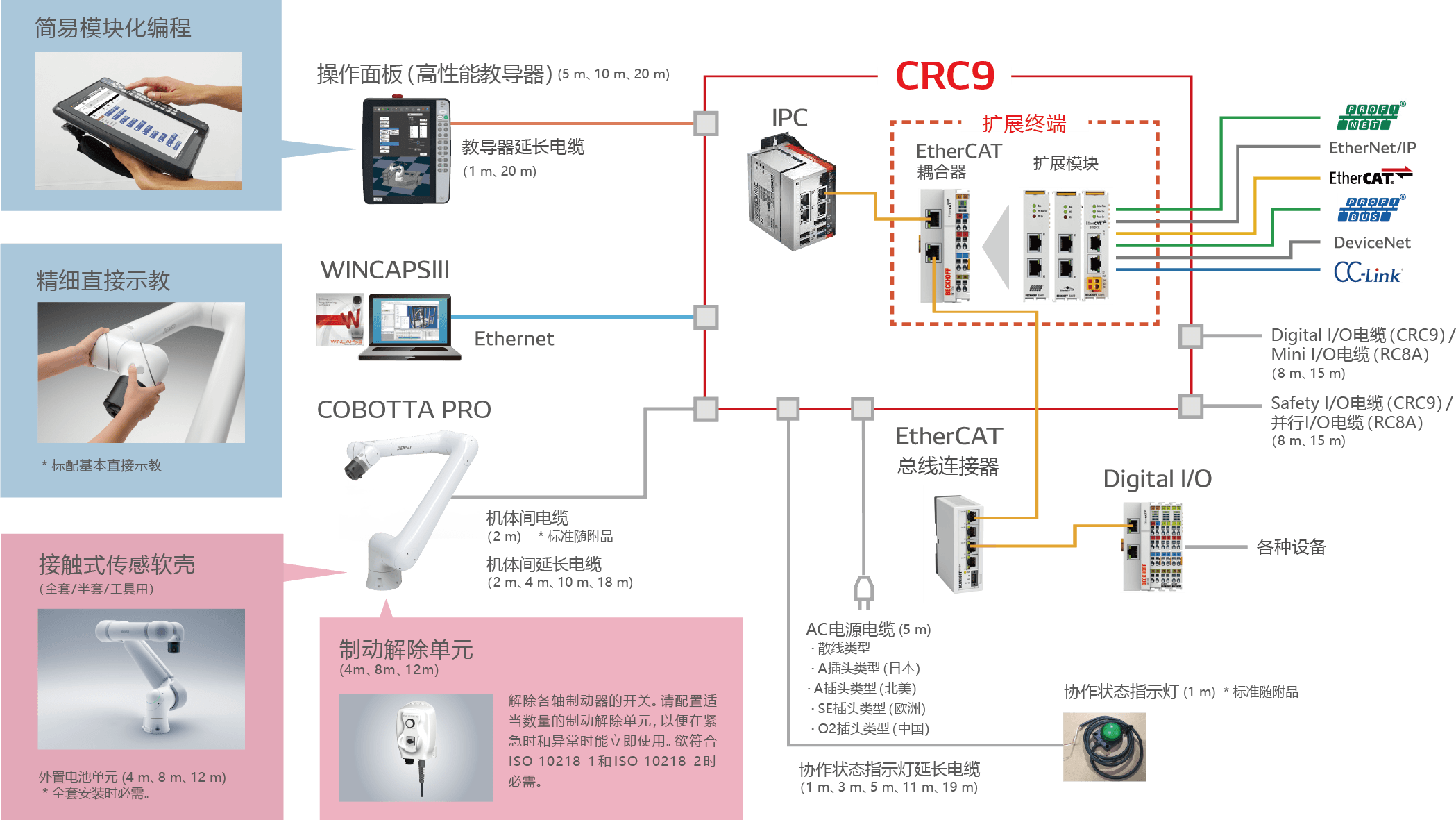
这是可以由固件提供的新概念机器人控制器。 我们为每个客户提供最佳的机器人系统。
| 型号 | RC9M | RC9L | CRC9 | |
|---|---|---|---|---|
| 适用机器人 | VMB-2515系列 | VLA-4025系列 | COBOTTA PRO 900 / COBOTTA PRO 1300 | |
 |
 |
 |
||
| 电源 | 电源容量 | 4.5kVA | 10.0kVA | 1.0kVA |
| 输入电压范围 | 3相 AC200V-10%~AC230V+10% | 3相 AC400V-10%~AC480V+10% | 単相 AC200V-15%~AC240V+10% 単相 AC100V-15%~AC120V+10% |
|
| 电源频率 | 47~63Hz | |||
| 电源电缆长度 | 10m | 长度5m 从以下类型中选择。 ・散线类型 ・A插头类型(适用于日本) ・A插头类型(适用于北美) ・SE插头类型(适用于欧洲) ・O2插头类型(适用于中国) |
||
| 控制轴数 | 6 | |||
| 控制方式 | PTP、CP3维直线、3维圆弧 | |||
| 使用语言 | PacScript(DENSO机器人语言) | PacScript(DENSO机器人语言)、简易模块化编程(选项) | ||
| 示教方式 | 1)远程示教 2)数值输入(MDI) | 1)远程示教 2)数值输入 3)直接示教 4)精细直接示教(选项) |
||
| 外部信号 | Digital I/O | 专用输入:8点 / 专用输出:8点 通用输入:8点 / 通用输出:8点 |
专用输入:8点 / 专用输出:9 or 10点 通用输入:8点 / 通用输出:7 or 8点 |
|
| Hand I/O | 通用输入:12点 / 通用输出:12点 | 通用输入:6点 / 通用输出:6点 (包含在本体之间电缆中) |
― | |
| Safety I/O | 专用输入:6点 / 专用输出:8点 | 通用安全输入:16点 通用安全输出:16点 外部紧急停止输入:2点 自动使能输入:2点 防护停止输入:2点 使能SW输出:2点 教导器紧急停止输出:2点 STO监控输出:2点 |
||
| 外部通信 | Ethernet | 机器人控制器侧面:1线路(GbE:Gigabit Ethernet) | 机器人控制器正面:2条线路(GbE:Gigabit Ethernet)(1条线路是安全参数发送专用线路) | |
| EtherCAT | - | 机器人控制器正面:1条线路 | ||
| USB | 机器人控制器侧面:1线路 机器人控制器内部(机器人控制IPC):3线路 | 机器人控制器正面:1条线路 机器人控制器内部(机器人控制IPC):2条线路 |
||
| 选装件扩展 | 3装置(2个I/O端子计为1个单元) | |||
| 自我诊断功能 | 过载、伺服异常、内存异常、输入错误、短路检测(用户线路部)等 | |||
| 错误显示 | 外部错误输出 | |||
| 小型编程器(选项)显示错误代码 | 操作面板(高性能教导器)(选项)、 上显示错误信息和恢复方法 |
|||
| 示教编程器(选项)显示错误信息、还原方法 | ||||
| 环境条件(运行时) | 温度0~40℃、湿度20~90%RH(不可结露) | 温度0~50℃、湿度20~90%RH(不可凝结) | ||
| I/O电源 | 使用外部电源 | 外部供电DC24V±10% | ||
| 使用内部电源 | 控制器内部供电DC24V±10% | |||
| 安全性能(安全功能) | PL d, Cat. 3 | |||
| 过电压类别(IEC 60664-) | Ⅲ | II | ||
| 触电保护等级 | Ⅰ | - | ||
| 防护等级 | IP54 | IP20, IP54 | ||
| 汚損度(IEC 60664-1) | 3 | IP20:2*¹ IP54:3 |
||
| 质量(不包含变压器质量) | 约93kg | 约104kg | IP20:约15kg IP54:约18kg |
|
| 外形尺寸 | 600(W)×582(D)×690(H)mm | 600(W)×582(D)×840(H)mm | IP20:420(W)×360(D)×200(H) IP54:420(W)×461(D)×200(H) 包括螺丝部,橡胶脚除外 |
|
| 适用标准 | ISO 10218-1:2011, ISO 13849-1:2015, IEC 60204-1:2016/A1:2021, EN 61000-6-7:2015 | ISO 12100:2010, ISO 10218-1:2011, ISO 13849-1:2015, IEC 60204-1:2016/A1:2021, ISO/TS 15066:2016, ISO 13850:2015, IEC 61508-1:2010 series, IEC 61800-5-1:2022, IEC 61800-5-2:2016, EN 61000-6-7:2015, IEC 63000:2018, ANSI/RIA R15.06-2012, CAN/CSA-Z434-14 |
||
| EtherCAT电缆 | RJ45-RJ45, 固定用:0.5, 2, 5, 10, 20, 40m | ||
| RJ45-RJ45, 耐弯曲用:0.5, 2, 5, 10, 20, 40m | |||
| EtherCAT端子盒用电缆 | 电源电缆 | M8-Open, 可动用:2, 10, 40m | |
| M8-M8, 可动用:0.5, 2, 5, 10, 20, 40m | |||
| 7/8"-Open, 耐弯曲用:2, 10, 40m | |||
| 7/8"-7/8", 耐弯曲用:0.5, 2, 5, 10, 20, 40m | |||
| EtherCAT电缆 | M8-RJ45, 耐弯曲用:0.5, 2, 5, 10, 20, 40m | ||
| M8-M8, 可动用:0.5, 2, 5, 10, 20, 40m | |||
| IO-Link用传感器电缆 | M12-Open, Class A, 可动用:2, 10, 40m | ||
| M12-M12, Class A, 可动用:0.5, 2, 5, 10, 20, 40m | |||
| M12-Open, Class B, 耐弯曲用:2, 10, 40m | |||
| M12-M12, Class B, 耐弯曲用:0.5, 2, 5, 10, 20, 40m | |||
| DIO用传感器电缆 | M8-Open, 可动用:2, 10, 40m | ||
| 扩展功能 (USB加密狗许可证) |
TwinCAT3 PLC | ||
| TwinCAT3 PLC + HMI Web | |||
| 电源 | 电源变压器(VMB)(附帯) | ||
| 电源变压器(VLA)(附帯) | |||
| 现场网络 | EtherCAT总线连接器 | 3端口,4端口,8端口 | |
| EtherCAT网桥 终端 | |||
| PROFINET RT控制器 终端 | |||
| PROFINET RT设备 终端 | |||
| EtherNet/IP主站 终端 | |||
| EtherNet/IP从站 终端 | |||
| PROFIBUS主站 终端 | |||
| PROFIBUS从站 终端 | |||
| DeviceNet主站 终端 | |||
| DeviceNet从站 终端 | |||
| CC-Link从站 终端 | |||
| 串行通信 | RS232C 2ch 终端 | ||
| RS422/RS485 2ch 终端 | |||
| 数字输入出 | 数字输入 终端 PNP, 8点, 10µs, IP20 | ||
| 数字输入 终端 PNP, 16点, 3ms, IP20 | |||
| 数字输出 终端 PNP, 8点, 0.5A, IP20 | |||
| 数字输出 终端 PNP, 16点, 0.5A, IP20 | |||
| 数字输入 终端 NPN, 8点, 10µs, IP20 | |||
| 数字输入 终端 NPN, 16点, 3ms, IP20 | |||
| 数字输出 终端 NPN, 8点, 0.5A, IP20 | |||
| 数字输出 终端 NPN, 16点, 0.5A, IP20 | |||
| EtherCAT盒子 | DIO, PNP, 16点, 3ms, IP67 | ||
| DIO, NPN, 16点, 3ms, IP67 | |||
| IO Link主机, Class A, IP67 | 4端口, 8端口 | ||
| IO Link主机, Class B, IP67 | 4端口, 8端口 | ||
| DIO用保护插头M8 50个套装 | |||
| IO Link用保护插头M12 50个套装 | |||
| 其他 | EtherCAT耦合器+总线端盖套装(附带) | ||
| EtherCAT耦合器终端(单体) | |||
| 总线端盖(単体) | |||
| EtherCAT扩展终端 | |||
| Ethernet扩展模块(附带) | |||
| AC电源电缆 (5m) ※必须选择其中一种 |
散线类型 | ||
| A插头类型(适用于日本) | |||
| A插头类型(适用北美) | |||
| SE插头类型(适用于欧洲) | |||
| O2插头类型(适用于中国) | |||
| EtherCAT电缆 | RJ45-RJ45, 固定用:0.5、2、5、10、20、40m | ||
| RJ45-RJ45, 耐弯曲用:0.5、2、5、10、20、40m | |||
| EtherCAT端子盒用电缆 | 电源电缆 | M8-Open, 可动用:2、10、40m | |
| M8-M8, 可动用:0.5、2、5、10、20、40m | |||
| 7/8"-Open, 耐弯曲用:2、10、40m | |||
| 7/8"-7/8", 耐弯曲用:0.5、2、5、10、20、40m | |||
| EtherCAT电缆 | M8-RJ45, 耐弯曲用:0.5、2、5、10、20、40m | ||
| M8-M8, 可动用:0.5、2、5、10、20、40m | |||
| IO-Link用传感器电缆 | M12-Open, Class A, 可动用:2、10、40m | ||
| M12-M12, Class A, 可动用:0.5、2、5、10、20、40m | |||
| M12-Open, Class B, 耐弯曲用:2、10、40m | |||
| M12-M12, Class B, 耐弯曲用:0.5、2、5、10、20、40m | |||
| DIO用传感器电缆 | M8-Open, 可动用:2、10、40m | ||
| 扩展功能 (USB加密狗许可证) |
TwinCAT3 PLC | ||
| TwinCAT3 PLC + HMI Web | |||
| 现场网络 | EtherCAT总线连接器 | 3端口,4端口,8端口 | |
| EtherCAT网桥 终端 | |||
| PROFINET RT控制器 终端 | |||
| PROFINET RT设备 终端 | |||
| EtherNet/IP主站 终端 | |||
| EtherNet/IP从站 终端 | |||
| PROFIBUS主站 终端 | |||
| PROFIBUS从站 终端 | |||
| DeviceNet主站 终端 | |||
| DeviceNet从站 终端 | |||
| CC-Link从站 终端 | |||
| 串行通信 | RS232C 2ch 终端 | ||
| RS422/RS485 2ch 终端 | |||
| 数字输入出 | 数字输入 终端 PNP, 8点, 10µs, IP20 | ||
| 数字输入 终端 PNP, 16点, 3ms, IP20 | |||
| 数字输出 终端 PNP, 8点, 0.5A, IP20 | |||
| 数字输出 终端 PNP, 16点, 0.5A, IP20 | |||
| 数字输入 终端 NPN, 8点, 10µs, IP20 | |||
| 数字输入 终端 NPN, 16点, 3ms, IP20 | |||
| 数字输出 终端 NPN, 8点, 0.5A, IP20 | |||
| 数字输出 终端 NPN, 16点, 0.5A, IP20 | |||
| EtherCAT盒子 | DIO, PNP, 16点, 3ms, IP67 | ||
| DIO, NPN, 16点, 3ms, IP67 | |||
| IO Link主机, Class A, IP67 | 4端口, 8端口 | ||
| IO Link主机, Class B, IP67 | 4端口, 8端口 | ||
| DIO用保护插头M8 50个套装 | |||
| IO Link用保护插头M12 50个套装 | |||
| 其他 | EtherCAT耦合器+总线端盖套装(附带) | ||
| EtherCAT耦合器终端(单体) | |||
| 总线端盖(単体) | |||
| EtherCAT扩展终端 | |||
| Ethernet扩展模块(附带) | |||
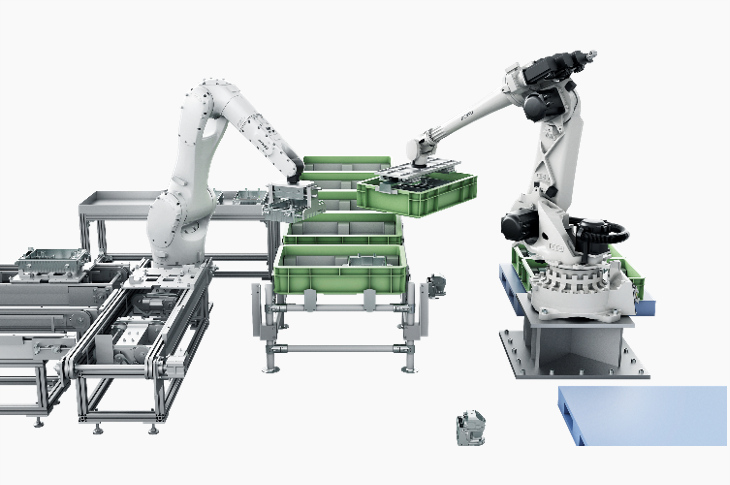
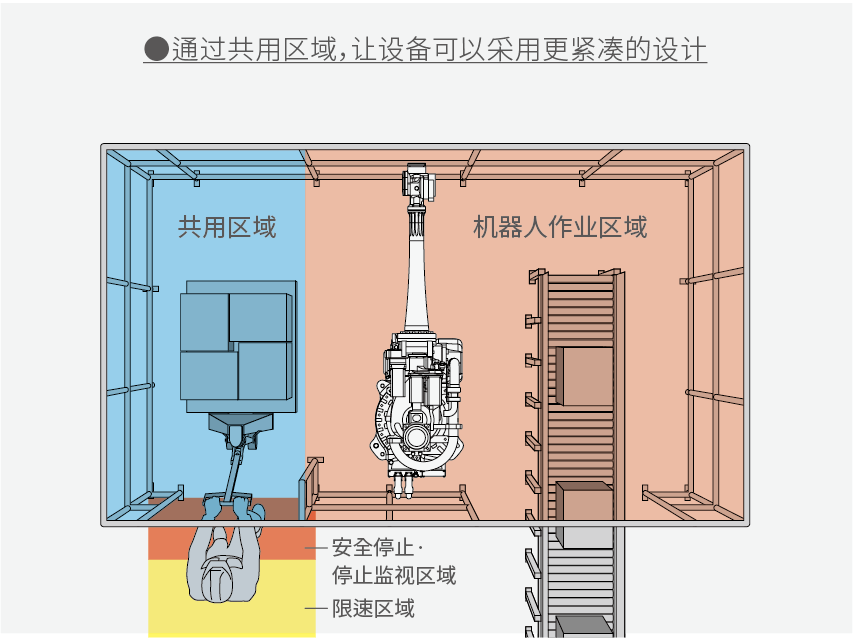
可共用动作区域,保障设备安全的同时实现高生产效率。
*2024年发布。
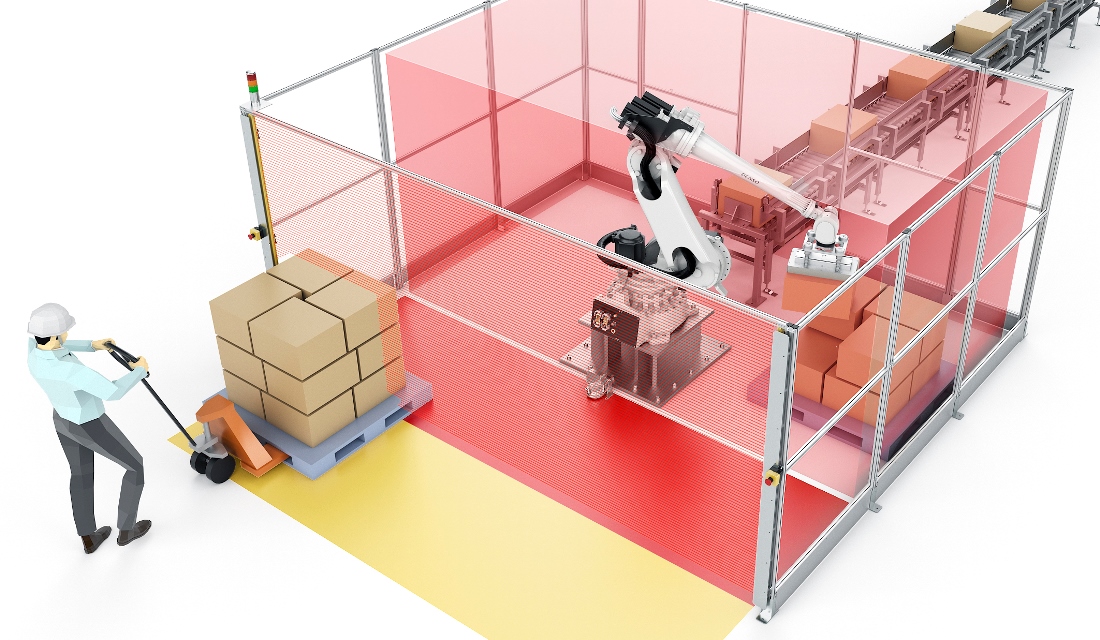
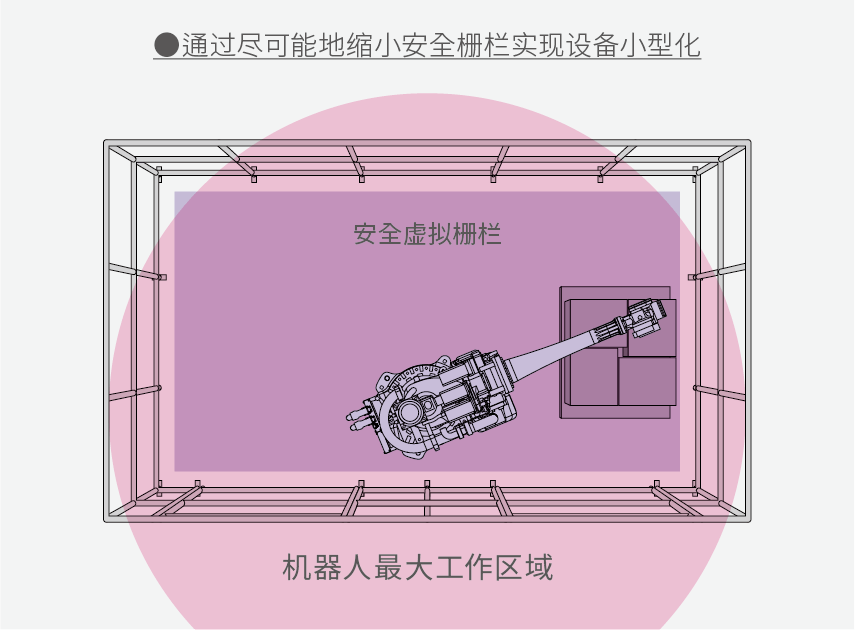
通过安全虚拟栅栏功能,可以有效监视机器人的动作范围是否有超过设定的动作范围。
■ 优点
・通过尽可能地缩小安全栅栏,让设备可以采用更紧凑的设计
・通过使用传感器,可设置人与机器人的共用区域
通过速度监视功能,可以有效监视机器人的速度是否有超过设定的速度。
■ 优点
・在传感器*检测到有人接近时,会减速至安全速度
通过静止状态监视功能,可以有效监视机器人是否在停止后处于维持马达启动的静止状态。
■ 优点
・在传感器*检测到有人进入停止区域时,机器人以维持马达启动状态停止
・通过保持静止状态,可实现程序的短时间快速重启
| 名称 | 内容 |
|---|---|
| 紧急停止功能 | 减速停止机器人,停止后关闭电机动力的功能。程序将被复位停止 |
| 防护停止功能 | 防护停止功能(保护停止功能)连接机器人设备的安全防护物等信号,根据信号的输入停止机器人的功能 |
| 速度监视功能 | 监视机器人是否超过指定的动作速度的功能 |
| 轴限制功能 | 监视机器人的各轴是否超过指定动作范围的功能 |
| 监视静止功能 | 监视机器人是否在电机ON的状态下停止,并且不会移动的功能 |
| 安全虚拟栅栏功能 | 监视机器人是否超出用户指定的动作范围外的功能 |









为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)