



展位布局
会场地图 DENSO WAVE展位号:东3馆 E3-11








COBOTTA PRO
追求生产效率与安全性的
高速人机协作机器人
「COBOTTA PRO」
展览将包括与人的动作和声音交互并进行协动作业的的最新应用。

-

【A-01】未来的制造工厂
为了实现大规模定制,将展示一个未来的制造工厂,在那里只使用双臂机器人进行生产,无需特殊设备或夹具。
参见解释性面板
协助制作:电装株式会社 -

【A-02】使用AMR的自动搬运、组装系统
COBOTTA PRO 可安装在 AMR(自主移动运输机器人)上,在加工过程中自动运行,并自动执行从装配到拧紧螺钉等各种多工序任务。
参见解释性面板 -

【A-03】人机协作的滑板车组装作业
拆装滑板车轮胎和组装手把把手的协作演示。 我们建议通过协作机器人才能实现自动化,在这种情况下,人类和机器人可以在任务中相互交流和帮助。
参见解释性面板 -

【A-04】简易、高精度谁都能轻松上手的示教系统
无论是初次接触机器人的操作员,还是经验丰富的熟练者,都可以通过丰富的支持功能来解决问题。 我们诚邀您体验精细直接示教和模块化编程。
参见解释性面板

TwinCAT
实时控制软件
通过使用 TwinCAT
实现高复杂性任务的自动化
高难度任务的自动化
届时将展示许多利用高度可扩展的 TwinCAT 实时控制软件的最新应用。 此外,还将介绍使用 RC9 实现高难度工作自动化的情况,RC9 可实现集成设备控制。

-

【B-01】利用机械学习的准排列工件分拣
通过二维摄像头获取的图像数据推断出三维信息,从而实现对准倾斜工件的拾取。
参见解释性面板 -
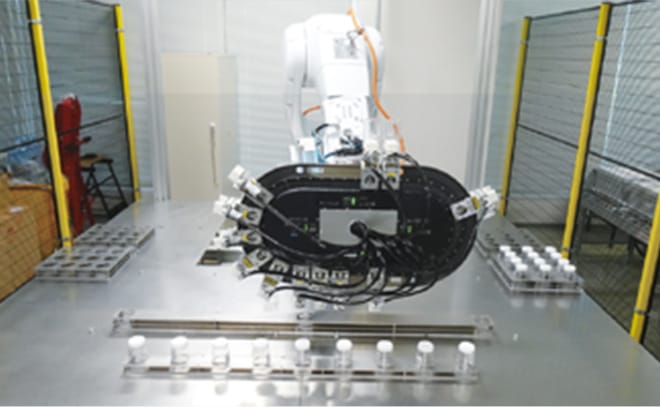
【B-02】使用电子凸轮实现电缆布线操作自动化
通过利用电子凸轮功能,可实现机器人和执行器的同步控制,从而将过去主要由人工完成的电缆布线任务自动化。
参见解释性面板 -

【B-03】通过语音识别功能直接控制机器人
使用语音指令向机器人发出指令并对其进行控制。 即使双手被占用,也能轻松操作机器人。 请亲自体验一下。
参见解释性面板 -

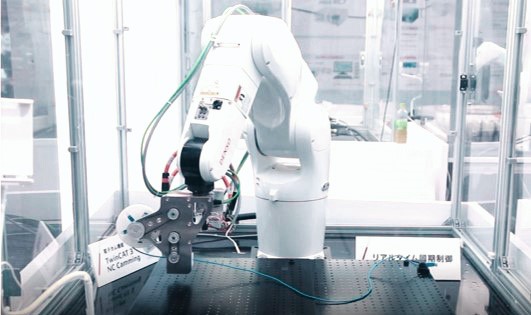
【B-04】通过G代码直接控制机器人
根据 CAD 数据生成的 G 代码直接控制机器人。 可用于需要复杂轨迹的应用,如密封应用,建议减少工时。
参见解释性面板 -
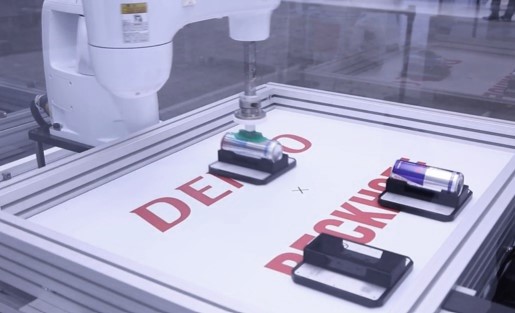
【B-05】使用RC9实现机器人与外部驱动装置的实时同步控制
实时同步控制 VMB 机器人和 XTS(线性传输系统),实现机器人永不停机。 演示在不停止机器人的情况下高速、高精度地排列和排出瓶子。
参见解释性面板 -

【B-06】利用MC9的原创机器人开发支援与控制
在 RC9 的基础上开发的运动控制器 MC9 可作为原创机器人的控制器;这里介绍了MC9 与市场上销售的并联机器人的组合。
参见解释性面板 -
【B-07】与无轨磁悬浮搬运系统XPlanar间的实时同步控制
通过对 HSR 机器人和 Xplanar(无导向悬浮传送系统)的实时同步控制,机器人可以在悬浮状态下跟随移动的移动装置,实现无间断分拣。 这里介绍了无导向悬浮传送系统和机器人协同工作的理想方式。
参见解释性面板

AI Solution
以前难以自动化的任务
人工智能技术提供了一种解决方案
我们将展示用AI来解决难以用程序语言实现的手动工作,从而降低工程师的负担。
-

【C-01】能以自然语言响应命令,运用AI技术的自动咖啡调配机器人
该机器人能根据语音指令制作咖啡;借助 ChatGPT,它能理解模棱两可的复杂指令,其人工智能模仿学习技能使其能够高度准确地再现指令中的舀水、倒水、搅拌等动作。
参见解释性面板 -

【C-02】使用ChatGPT,用自然语言生成机器人程序
机器人的程序是通过用自然语言向 ChatGPT 讲述要完成的工作而生成的。 这就为在不久的将来,不懂技术的新手也能轻松操控机器人提供了可能。
参见解释性面板 -

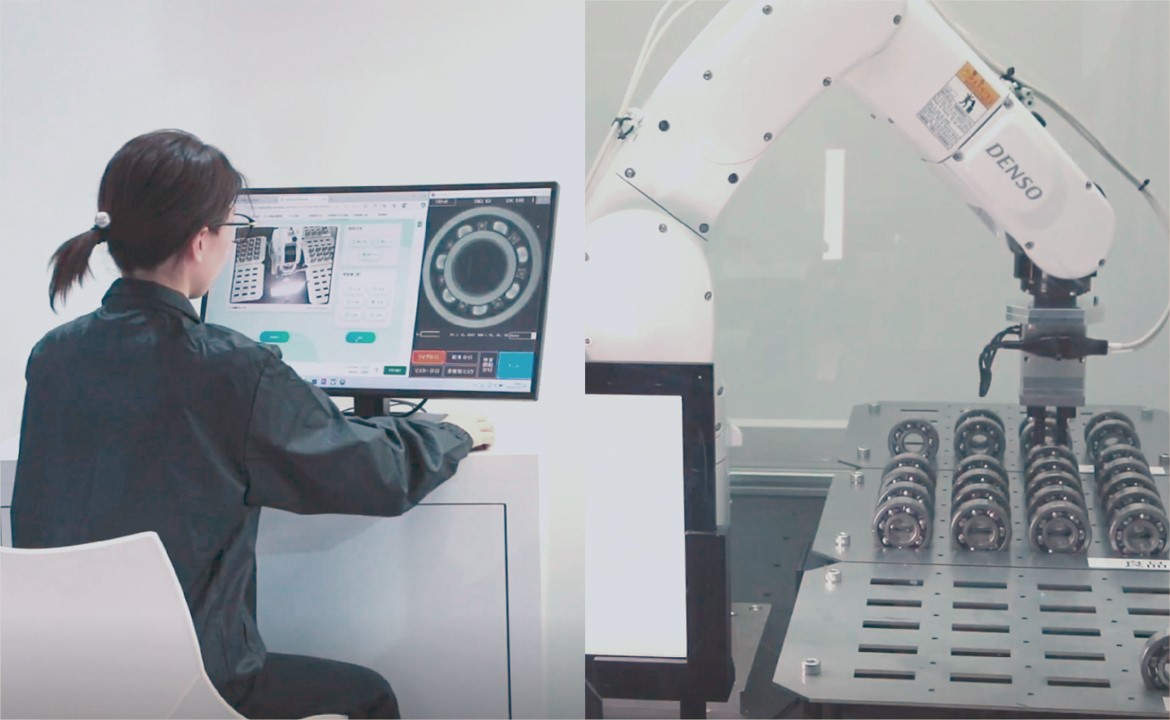
【C-03】通过搭载AI的3D视觉相机Mech Eye实现无主机分拣
配备人工智能的高精度三维视觉系统 Mech Eye 采用深度学习技术,对日常用品进行图像识别和拣选操作。 独创的夹治具带有新开发的可变角度吸取部,可在不留下任何工件的情况下进行拣选。
参见解释性面板 -

【C-04】利用“多台机器人最佳路线规划”实现“不发生碰撞”的高速工件排列
人工智能可自动生成多个机器人和外围设备互不干扰的最短周期路径,并通过电子凸轮对其进行控制。 这就减轻了多个机器人的编程和调整工作的难度。
参见解释性面板 -

【C-05】通过带AI的3D视觉系统对小尺寸、透明、高反光工件进行分拣
Cambrian公司的三维视觉系统可以对小型、透明和闪亮的工件进行批量分拣,这些工件不适合传统的三维机器视觉。
参见解释性面板

System Solution
支持简单导入的成套系统
将电装机器人提供的解决方案进行成套系统化以对客户的自动化提供支持。

-

【D-01】COBOTTA LAB 实验室自动化
对运用COBOTTA的 整个系统实施集成控制单元,实现了实验室自动化。 五种不同的任务均可实现自动化:粉末称重、pH 值测量、混合和搅拌、过滤和薄膜生成,而 AMR 上的 COBOTTA PRO 可通过在不同的 COBOTTA 标准单元之间移动,来实现一系列任务的自动化。
参见解释性面板 -

【D-02】活用捕捉人类动作的姿势跟踪传感器的曲面研磨系统
机器人可以再现熟练工人无意识进行的打磨操作。 这种模仿动作的示教方法大大减少了调试工时,无需编程。
参见解释性面板 -
【D-03】风险评估导入支援服务
在引进DENSO机器人的过程中,我们为一系列流程提供支持,包括风险分析、评估以及对配备DENSO机器人的系统运行期间的降本措施提出建议。
参见解释性面板 -

【D-04】运用了COBOTTA PRO和3D视觉的散货分拣
即使没有导入机器人的经验,或者对设备和规格进行调查研究也很困难的情况下,可简单地通过选择相应模块来快速导入和搭建机器人控制系统。本次介绍的是使用COBOTTA PRO 和高精度 3D 视觉 "Mech-Eye "组合的形式来进行零部件组装的演示机。
参见解释性面板 -
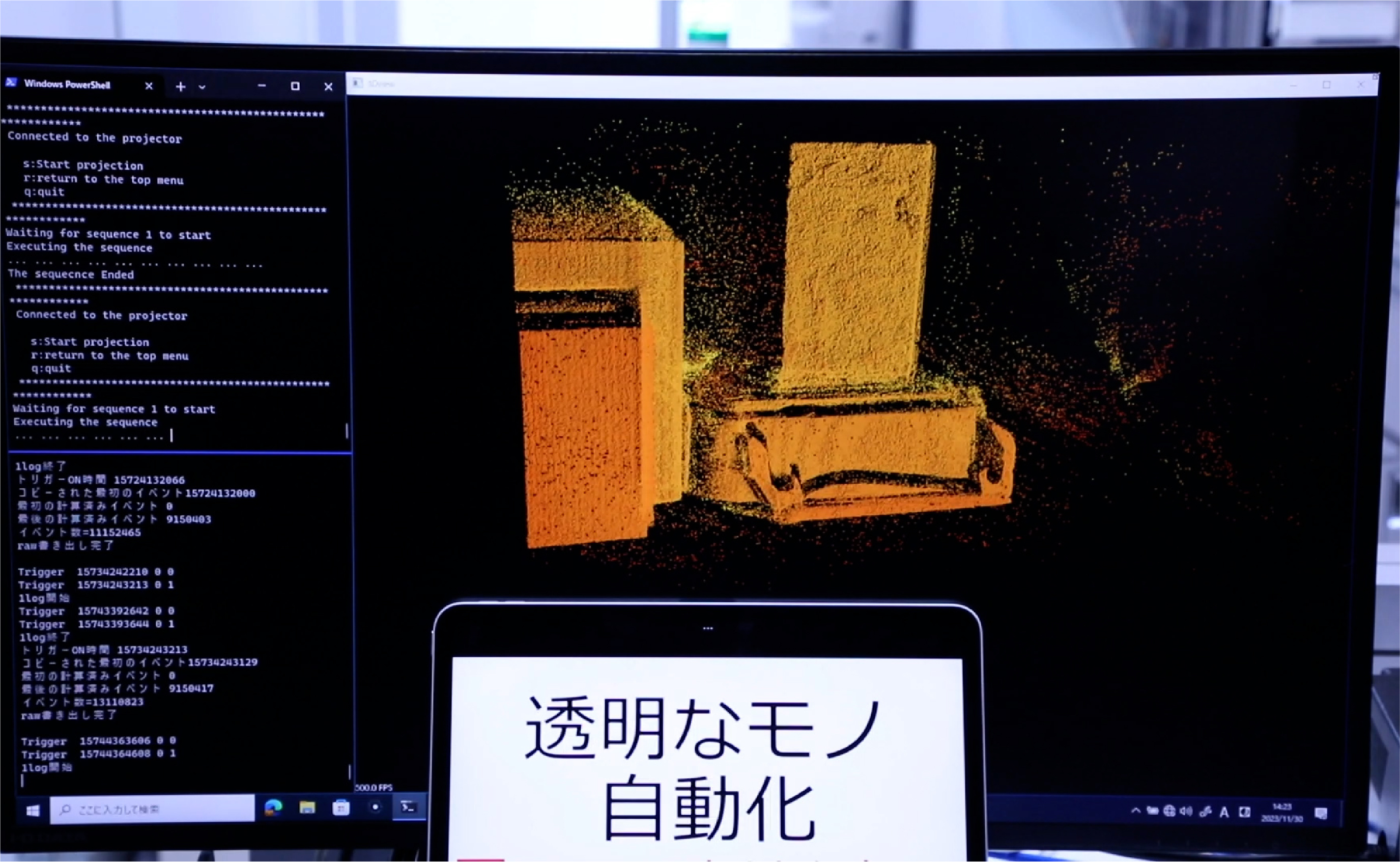
【D-05】事件相机3D机器视觉(供参考展品)
这是一种新提出的三维机器视觉系统,它结合了事件相机和构造光。
参见解释性面板
它可以对在非接触式测量中很难测量的金属、透明和漆黑材料等材料进行三维测量。 -

【D-06】通过自动分拣系统“ROBOTTANA”COBOTTA PRO实现零部件分拣
COBOTTA PRO 可自动从货架上一字排开的零件箱中拾取工件,并将操作员繁重的零件分配和零件供应工作自动化。
参见解释性面板
协助展示:金泽机工株式会社 -

【D-07】ROSを活用した協働計量システム
把原来需要人工来使用组合秤对食品称重的工作分配给COBOTTA PRO来协同工作从而达到节省人力的目的。
参见解释性面板
协助展示:株式会社RT -
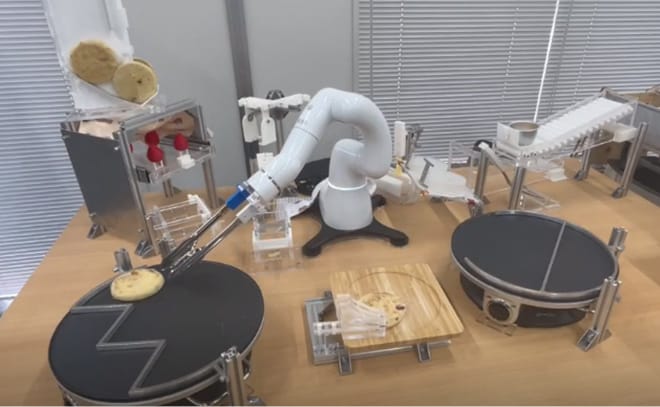
【D-08】使用COBOTTA进行英式玛芬烘培
使用COBOTTA烹饪英式玛芬。其理念是通过自动化创意,最大限度地利用人们使用的烹饪用具,用机器人取代人。
参见解释性面板
协助展示:爱知技术研究所

DX / Digital Twin
开放式平台实现
DX / 数字孪生的存在方式
将介绍数字模拟、VR 和远程控制等支持制造业的服务。 欢迎前来亲身体验。

-

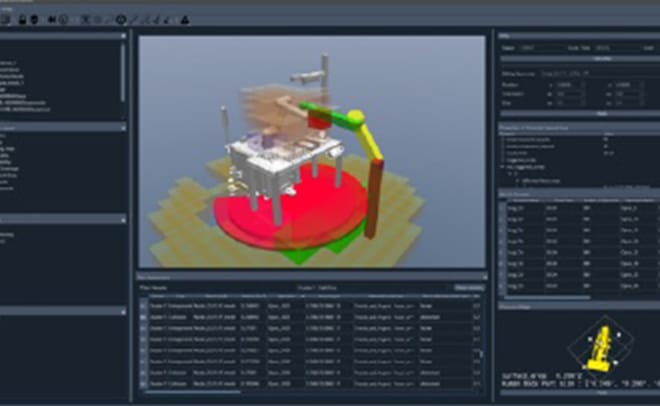
【E-01】使用 Unity 游戏引擎的机器人系统数字孪生(VR 体验)。
我们利用 Unity 游戏开发引擎平台提供数字孪生。 我们利用 Unity 的优势,提供虚拟空间特有的物联网和机器人教学。
协助展示:Unity Technologies Japan K.K. / realvirtual GmbH -
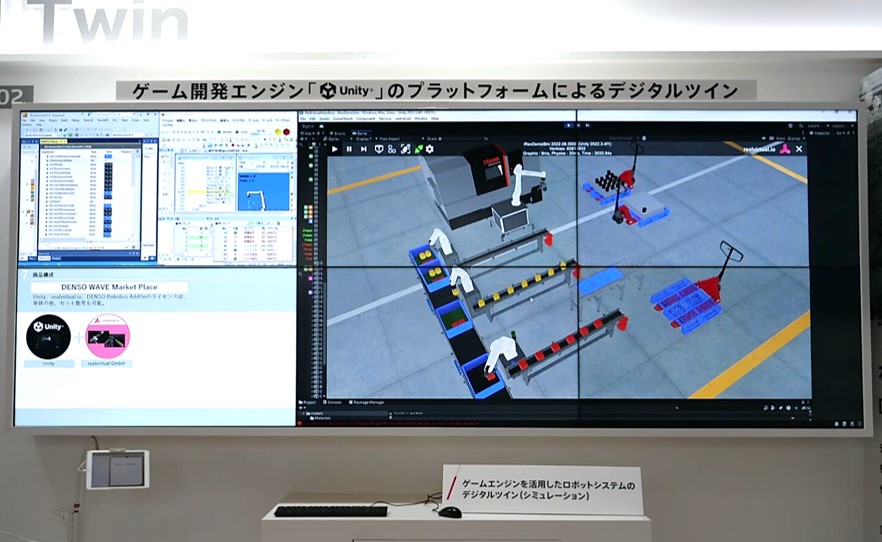
【E-02】使用 Unity 游戏引擎对机器人系统进行数字孪生(模拟)。
我们利用 Unity 游戏开发引擎平台提供数字孪生。 通过添加 realvirtual.io,可以提供 CAD 接口、运动组件、驱动器、传感器、TwinCAT 和 OPC UA 等接口,从而实现从机器人单元到生产线的各种数字孪生。
协助展示:Unity Technologies Japan K.K. / realvirtual GmbH -

【E-03】由机器人数字平台 ROBOCROSS 提供的DX
通过参与川崎重工业株式会社推出的机器人数字平台 ROBOCROSS,我们旨在促进数据的使用和利用,以解决社会问题,提高客户的企业价值。
-
【E-04】利用机器人远程操作服务的外观检查系统
我们提出了一种新型的自动化方式,即人与机器人远程协作,使用 Remolink 这种云服务,通过机器人实现远程工作。
参见解释性面板
协助展示:远程机器人公司/Skylogic公司

Energy Management
实现非碳化社会
碳足迹倡议
利用物联网集中管理所有设备的信息。 通过监控碳足迹,支持实现低碳化社会。

-
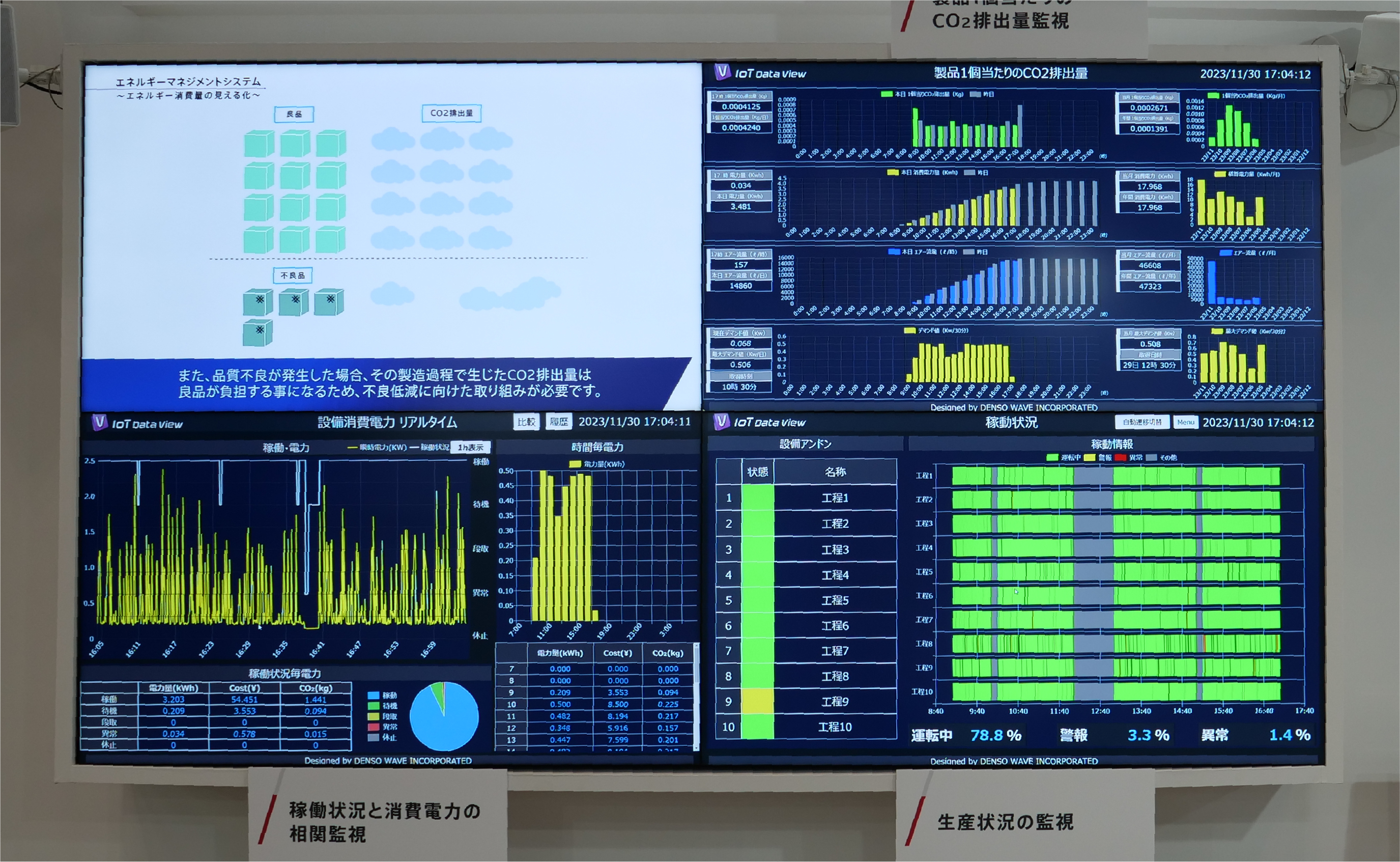
【F-01】通过能源监控系统 管理碳足迹和能源损失
它汇集了来自各种 FA 设备的数据,并收集和显示耗电量和设备运行信息。 通过准确识别能源消耗,该系统有助于减少碳足迹。
参见解释性面板
访问
会场地图 DENSO WAVE展位号:东3馆 E3-11
展会地点:东京国际展览中心
地址:〒135-0063 东京都江东区有明 3-11-1
电话:03-5530-1111