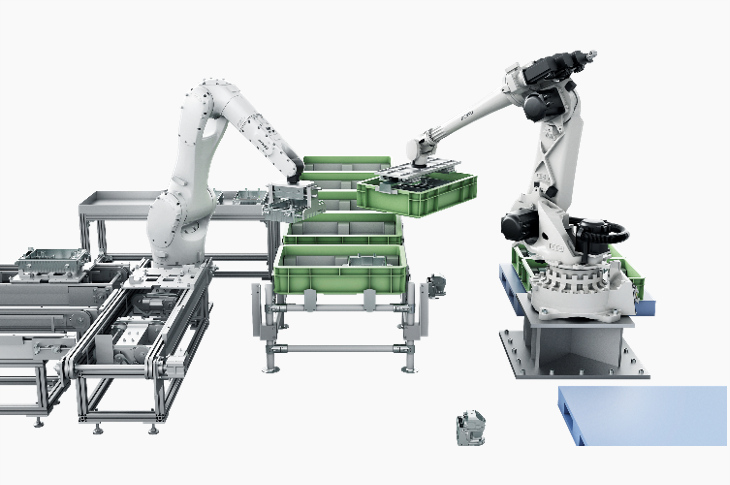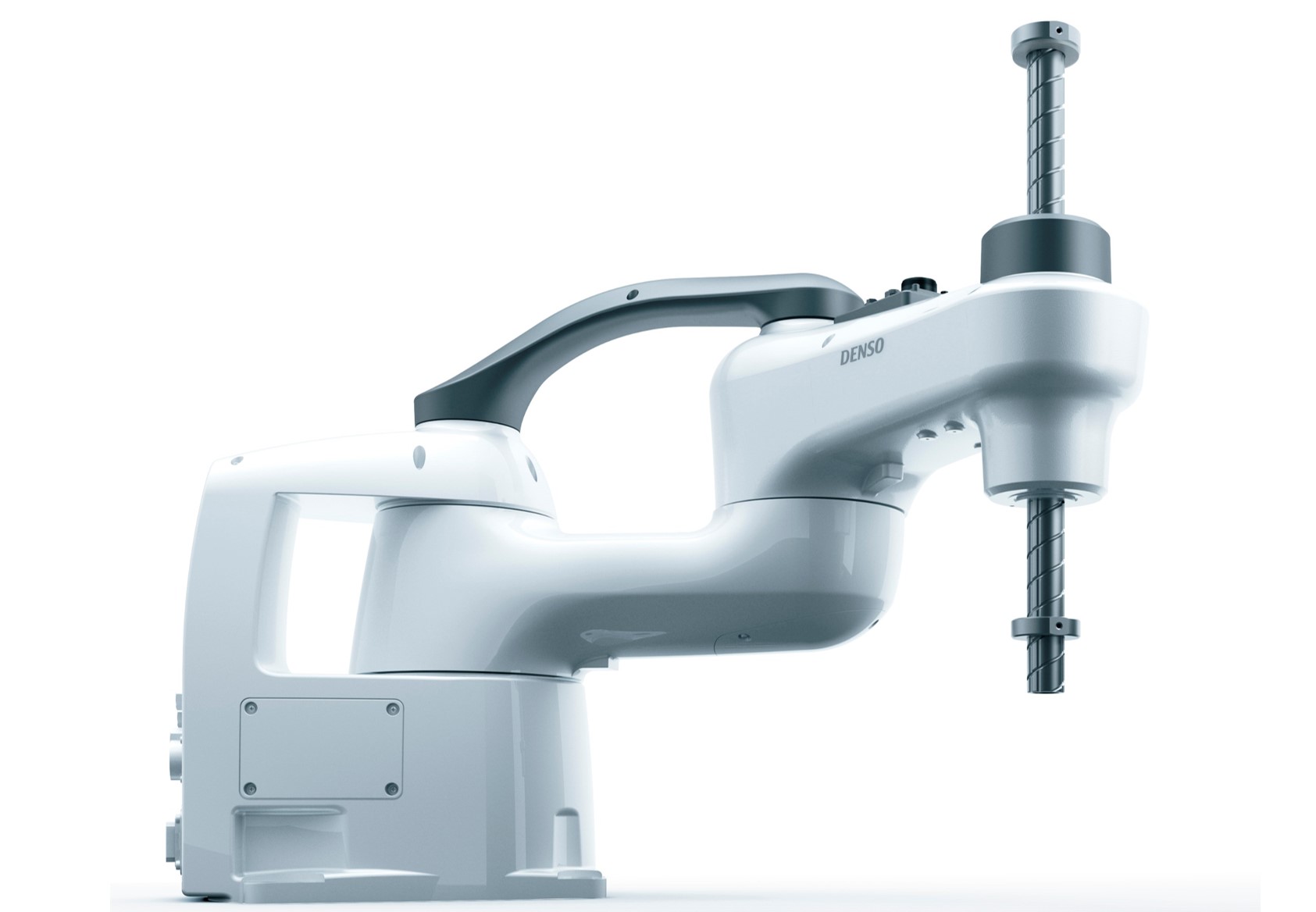
HSR(水平多关节机器人)是一款轻量化和刚度都得到了强化的新型高速水平关节型机器人,其高速性前所未有。负责统筹该产品企划团队的产品企划室室长如是说。“机器人的性能仅凭产品目录上的规格数值是难以全部涵盖的”。说实话,物理公式计算出来的数据很漂亮,但真正将机器人导入到现场实际操作起来的话,在动作上还是存在差异的。
能够持续高速工作、精确停止――当时对工厂内机器人的控制性能有这样的需求。他们决心一改一直以来受到行业重视的“最高瞬时速度”的观点,推进注重“CPM(Cycle Per Minute)=每分钟的工作量”的开发,摆脱速度竞争。这是一个大胆的决定,却也是认真面对顾客购买后的困惑而做出的诚挚决定。
一般来说,高速运转的机器人工作一定的时间后,电机发热,作业精度会降低。他们的目标是要开发出即使在那种情况下也能高速地“持续工作”的机器人。一切都是为了制造能够让顾客放心购买、操作性能稳定的机器人。但是,要想实现这一目标,需要有能够准确操纵机械臂动作的控制设备。通常,机器人的开发都是从机械设计着手,确定结构后再转入控制设计阶段。这次,彻底改变了开发流程。通过控制设计确定了理想的机械臂前后动作。“我们认为‘如何动作’决定作业的质量,因而从控制视角进行了开发”。成员们也都表示同意,控制设计完成后,确定了适合机器人动作的机械臂的结构。

开发过程中,在他们的面前横亘着许多必须要逾越的障碍。其中最大的障碍就是轻量化和刚度强化的两立。这是一款让2个相冲突要素两立的设计。而且,由于连续运转会使电机发热,因此也要考虑散热性。“要想使机械臂重量轻,就要将大容量的电机集中放在基座单元部,而不是臂部。为了在保证轻量的基础上提高刚度,修改了机械设计。高速转动的电机使基座单元部容易堆积热量,因而采取了各种对策,比如高效传热散热等”。成员们通过在电脑上做模拟实验,解决了这些课题。
他们等完成了以“CPM(Cycle Per Minute)= 每分钟的工作量”能力为最大特点的HSR系列的开发。这其中凝聚了DENSO WAVE特有的知识见解,这一点也不容忽视。一直以来,机械臂和控制器都是DENSO WAVE自制的,开发团队的成员对机械臂的特性(质量特性和惯性等)掌握的一清二楚。因此,在开发过程中能够事先预测机器人会发生的现象并采取对策,明确描绘出将对策链接到提高生产力的愿景。比如说,在振动方面,通过完善在振动发生前控制动作的机制,可准确平息振动,迅速转到下一个动作。这样有助于提高生产循环时间。

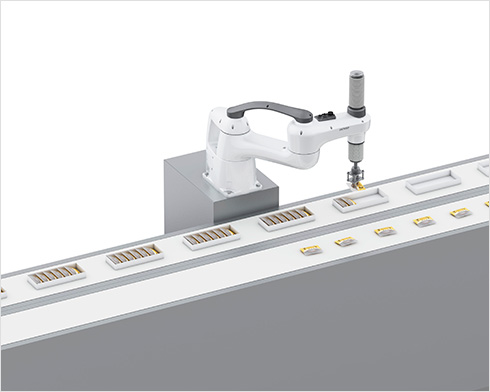
想要为导入机器人的顾客排忧解难,开发团队出于这样的心愿,一直努力于提高规格参数值。现在,HSR系列已经研发完成,他们等又迈开了挑战新领域的步伐。“不仅是一直以来以之为目标的汽车和电器行业,也将在食品、医药品、化妆品领域包装工序中的应用纳入视野。另外,还想让HSR与这三种行业 已经在使用的产品传送带跟踪功能(机器人配合传送带的移动而动作的功能)配套使用,使生产线更加畅通无阻”。而且,除了高速性之外,他们等也想同样重视操作性。“示教器的操作界面根据认知工程学而开发,彻底追求易用性,我们今后也将会为实现用户零压力操作性做出贡献”。
为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)