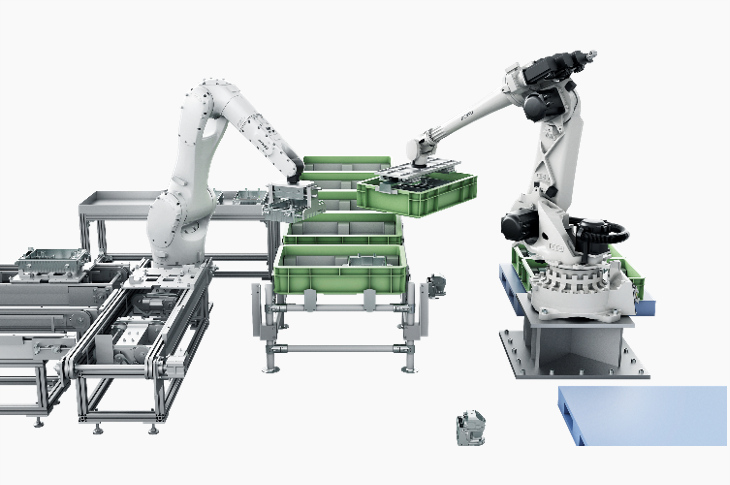
工业机器人不仅广泛应用于汽车制造和电子电气行业,从三品行业(食品、药品、化妆品)开始,也有着逐步向其他行业扩展的倾向。应用范围的扩大同时也增加了设备构建方面(集成)的负担。另外,与此相对应的是随着参与构建设备的工人数量增加,所需的功能和易用性也会有所不同。这些因素交织在一起,导致了工程成本增加等问题的出现。
为了解决这些问题,我们将继续维持我们从一开始就保持的开发环境的“开放性”,并为所有参与机器人技术的人提供“易用性”。
这么说来,“易用性”本身又是什么意思呢?
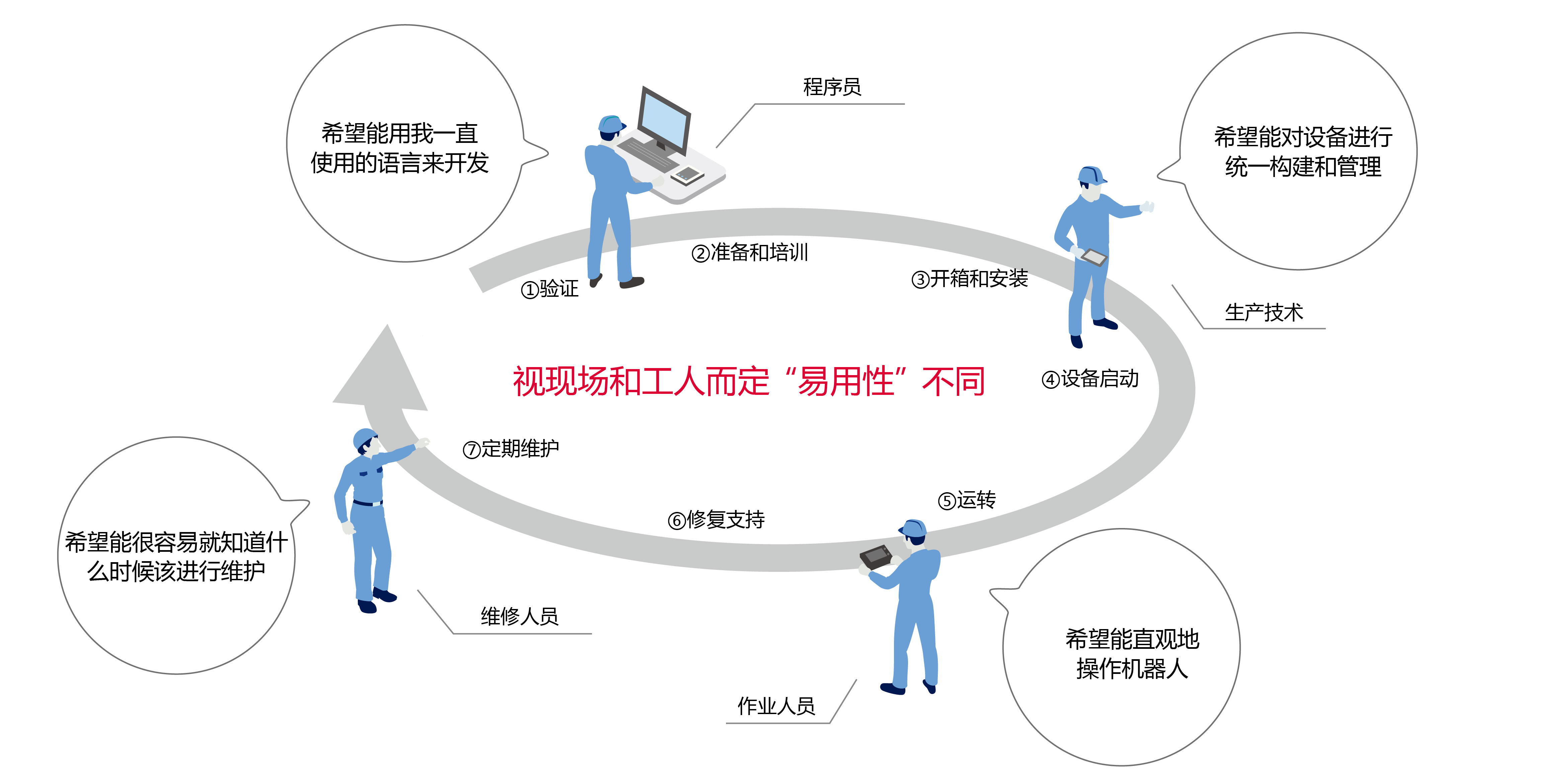
对于人类而言,不管机器人的编程或操作如何,最容易的事便是使用“自己惯用的工具”来进行操作。例如,如上图所示,对于至今为止从未使用过机器人的人来说,如果有直观且容易理解的操作工具的话便可能会觉得很简单。与此相对,既有按照传统做法更为顺手的人,也会有想用独自开发的软件来自由制作应用程序的工程师吧。这样一来,我们认为“易用性”会根据机器人的使用场景、应用程序的复杂性以及相关人员的使用目的而变更为不同的形式。
因此,我们认为为了向所有机器人专业人士提供“易用性”,有必要充实我们的机器人产品矩阵,并提供开放的开发环境,以支持开发者们广泛的应用,并为支持这些应用的软件、选配产品和支持服务提供保障。
对于机器人使用方面的“易用性”而言,不可或缺的便是“开放性”,即可以满足任何应用程序或开发环境的要求。
电装机器人的开放性可以追溯到1991年刚开始对外销售机器人的时候。电装于1997年发布的“RC5”符合SLIM语言,这是一种JIS工业机器人编程语言,并搭载有新增了应用函数和指令的PAC语言。后来,以欧洲为中心,诸如“希望通过PC来控制机器人”、“希望以惯用的语言来开发机器人”等需求越来越多,于是,我们便在2005年推出了“RC7”这款机器人控制器以满足这些需求。我们已经开始使用“ORiN”通信接口,其能够在FA设备和应用之间实现统一访问。2012年的“RC8”包括PacScript语言,该语言由PAC语言演变为符合Visual Basic语法的设备描述语言。后来也可以支持Visual Basic的应用程序了。
所有的开发都可以用一个人容易使用的语言来完成。我们认为,高度的开放性对于在保持传统开发环境的同时跟上现代应用日益增长的复杂性是必不可少、至关重要的。
我们在迄今为止持续提供的“开放性”这一基础上,进一步继承并提供了我们所认为的“简单性”。为此,我们开发出了这款新产品。首先是新型机器人控制器“RC9”,它的开发是为了简单地利用机器人来统一设备整体。RC9具有根据应用进行优化的扩张性,通过提供一个开放的开发环境,它还可以整合客户和系统集成商的技术。
为了将电装机器人应用于更广泛的工程中,我们还开发了具有可搬重量更高和臂长更长的特征的垂直多关节机器人——“VMB系列”和“VLA系列”。我们还开发了“WINCAPS Plus”,这是一组旨在简化机器人编程操作的应用程序,它提供了一个能适应机器人相关场景及作业人员的开发环境。此外,我们已经开始提供“DENSO Robotics® Cloud”这一云平台,它可以根据各种使用场景提供支持服务,包括机器人的安装及维护。
这些产品为参与设计、启动、运转和维护等场景及相关人员提供了“易用性”。
接下来,我们将向您展示“RC9”强大开发环境的秘密,它可以对设备整体进行统一控制,是机器人设备易于使用的关键。

为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)