































Thank you for coming to the DENSOWAVE PRIVATE SHOW 2016.The exhibition was held at the KARIYA Cultural Center from July 28(Thu.)to July 29(Fri.),2016.
Thank you very much for your visit.

A Cartesian coordinate robot employs an RC8 controller to manipulate its triaxial arm and wrist.
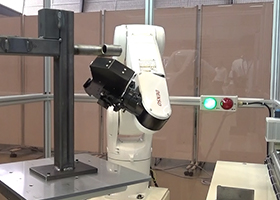
A flexible hexaxial robot with a 3D camera head measures weld beads in three dimensions and performs automatic inspection.

A robot controller automatically controls screw tightening torque, achieving high-speed, high-precision 3D screw tightening.
A robot makes a large number of continuous inspections, substantially reducing inspection time, while ensuring stable quality and traceability by automated inspection.

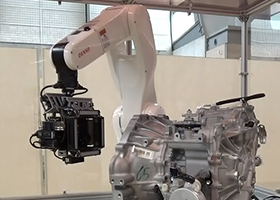
A combination of a flexible hexaxial robot and a unique optical and image processing software realizes high-speed appearance inspection surpassing the capacity of human eyes.

A robot trajectory is produced from 3D CAD/CAM data and real-time tracking work is reproduced without teaching.

A combination of robot picking and appearance inspection by a camera incorporating image processing realizes automated inspection.

Visualization of processing lines is achieved by a combination of front running loaders and machining centers with a height up to 1600 mm.
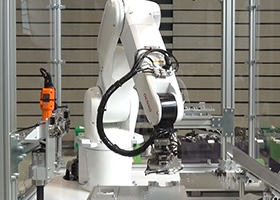
This tool changer can automatically replace robot hands in a short time, enabling a single robot to perform different operations such as assembly and transportation.

A combination of EYEFEEDER (biaxial vibration feeder) and general-purpose vision system detects the diameter and length of bolts, enabling accurate sorting.

Flexible line design is achieved by utilizing a highly versatile linear conveyor system, camera, 3D shape measuring, and robot.

Employing a flexible hexaxial robot improves productivity, realizing non-contact high-speed sealing from the upper, lower, horizontal, and diagonal directions.

A combination of a laser soldering unit and robot achieves high-density surface mounting, stable soldering, and flexible automation.
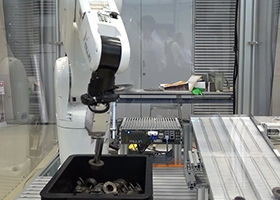
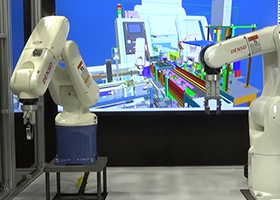
Bulk picking is achieved without teaching by incorporating 3D vision and real-time interference avoidance features.

Simultaneous random picking and scratch/foreign object inspection are achieved with high accuracy. Random picking uses process analysis of data from a 2D displacement sensor. Scratch/foreign object inspection was difficult with a conventional 2D camera.

The new robot pursues basic functions and achieves real high-speed performance.
It quickly starts moving, keeps moving fast, and stops accurately.
Safety and high productivity.
Robot stands-by without power cutoff by stop monitoring, and returns to its operation immediately after a personnel left.
Easily avoid interference among robots and peripheral devices.
It automatically restricts the entry of multiple robots into the same area at the same time.

Automate high difficulty assembly and transportation with cooperative control function.
Easy to consolidate management by programming multiple robots with single controller.

Canon high-performance 3D machine vision enables high-speed, high-precision 3D recognition of various parts.
Robot achieves high-speed and accurate Random picking.
덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)
