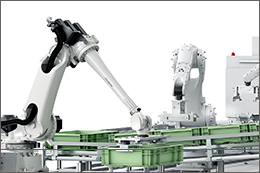
조작 디바이스(마스터)의 지령에 따라 떨어진 곳의 매니퓰레이터(슬레이브)를 동작하는 원격 조작 기능입니다.
대응 로봇: RC9 /RC8대응 수직 다관절 로봇 전 기종*1
협동 로봇 "COBOTTA"를 마스터 디바이스로 하여 COBOTTA의 암을 움직임으로써 직관적으로 대형 로봇을 조작할 수 있습니다.
또한 가상 펜스 기능을 활용하여 슬레이브 로봇의 동작 범위 지정이 가능하여 안전성을 확보합니다.
·프로그래밍에 익숙하지 않아도 직관적인 로봇의 교시 및 조작이 가능합니다.
·의약품 제조공정 등의 클린환경 밖에서의 조작이 가능하므로 이물 혼입 및 작업자의 오염을
막아줍니다.*1
이용하실 때는, "마스터·슬레이브"의 확장기능 라이센스가 필요합니다.
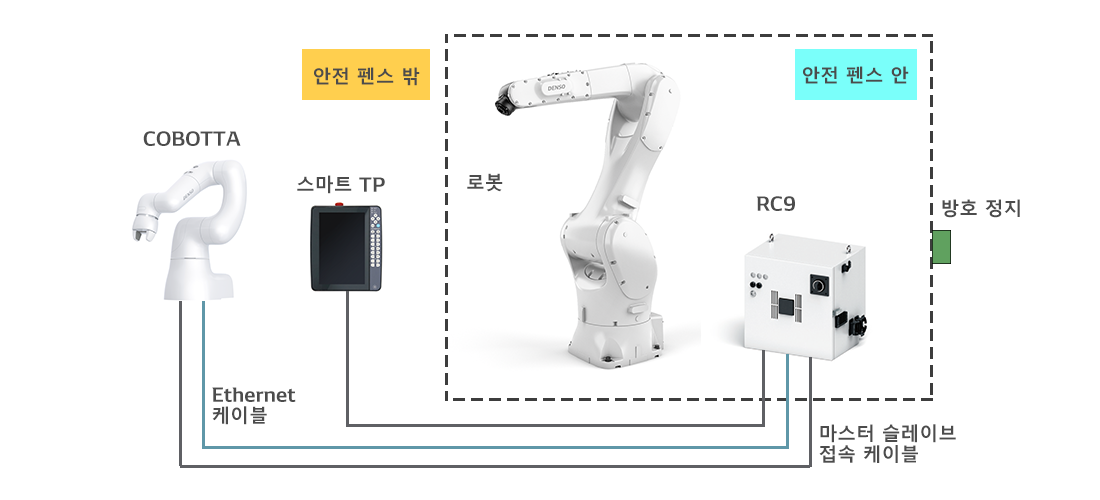
*1 :안전을 고려하여 슬레이브 로봇이 보이는 범위 내에서 케이블의 유효길이(최장 20m) 이내에서만 사용 가능합니다.

| 암길이(제1암+제2암) | 342.5(165+177.5)mm |
|---|---|
| 정격 가반 질량(최대 가반질량) | 0.5kg (중력 방향 시 ± 10도 이내일 경우 0.7kg) |
| 위치반복 정밀도 | ±0.05mm |
| 보호등급 | COBOTTA 본체 : IP30 AC 어댑터, AC 케이블 : IP20 |
덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)