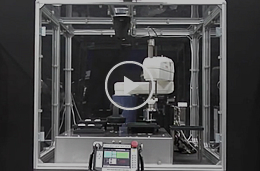
Controlled by Robot Operation System by collaborative robot COBOTTACOBOTTA COBOTTA's control API is made public, allowing creators to develop their own applications in the environment they choose.(OSS version)
COBOTTA can be used in research and education fields.
Cooperation: Aichi Institute of Technology
EYE FEEDER and EVPHS Random picking realized by combining a two-axis vibration feeder and a 2D built-in EVP
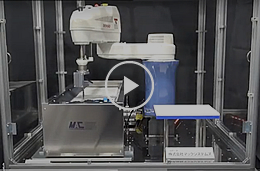
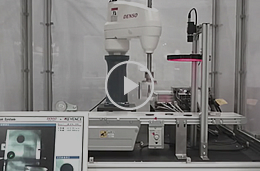
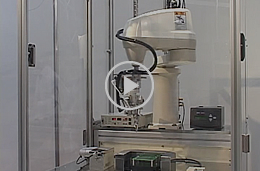
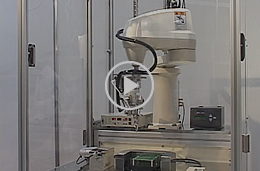
3D Picking of Translucent Plastic ContainersVS-050/060 Realizing 3D picking of translucent plastic containers, which are usually difficult to recognize, using unique image processing technology
Source: 3D MEDiA Co., Ltd.
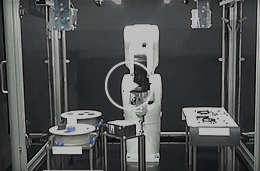
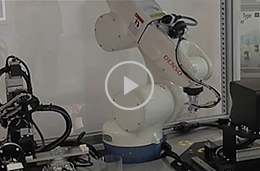
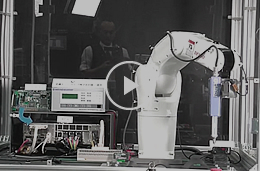
Network CamerasHS New solution with robots and network cameras
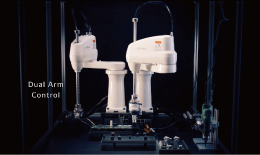
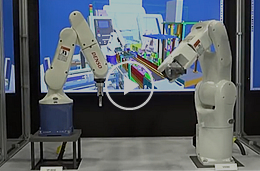
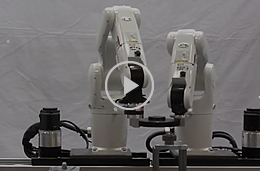
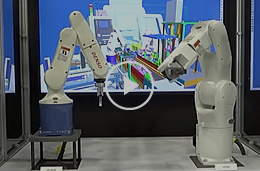
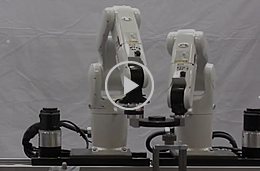
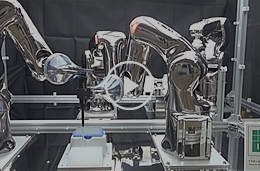
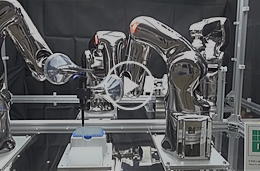
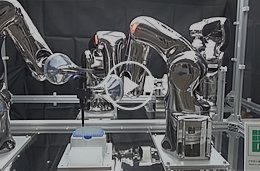
Cooperative Transportation + Force Control SystemVS-050/060 Realizing heavy object transportation and coordinated fitting by combining the “coordination” and “force control” functions with two robots
Cooperative Transportation + Force Control SystemVS-050/060 Realizing heavy object transportation and coordinated fitting by combining the “coordination” and “force control” functions with two robots
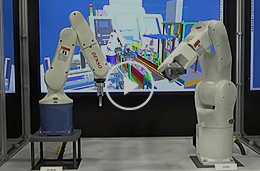
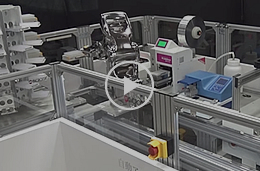
Conveyor TrackingHS Conveyor tracing function facilitating adjustment
HSConveyor tracing function facilitating adjustment
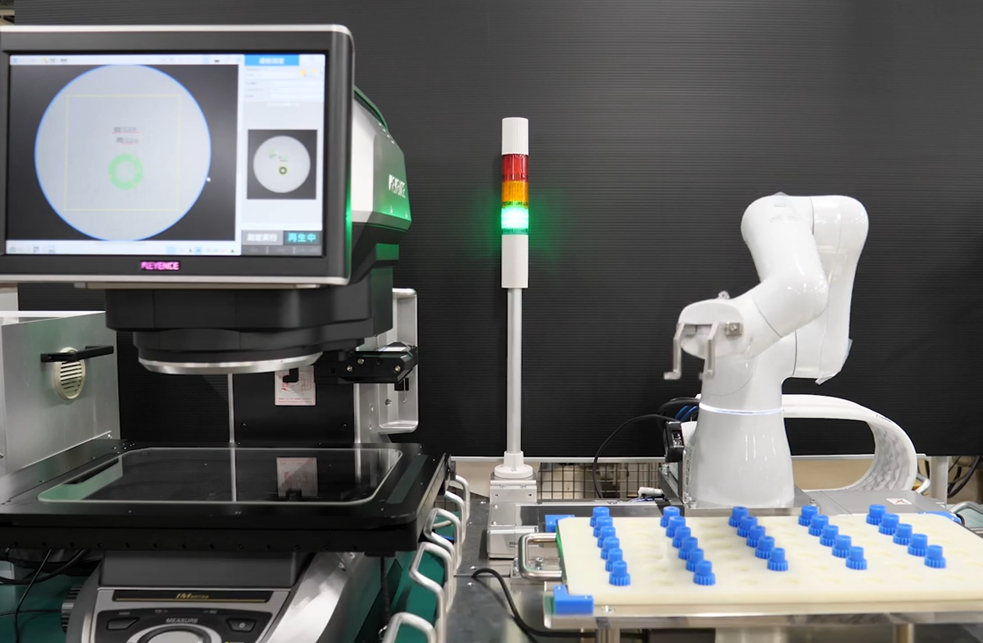
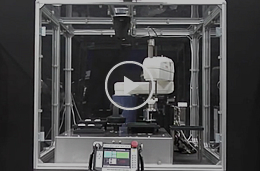
3D Picking + External Appearance InspectionVS-6556/6577 Automating bulk picking to inspection/sorting with 3D picking and external appearance inspection units
Source: Mitsuteck
EVE FEEDER and EVPHS Random picking realized by combining a two-axis vibration feeder and a 2D built-in EVP
3D Picking of Translucent Plastic ContainersVS-050/060 Realizing 3D picking of translucent plastic containers, which are usually difficult to recognize, using unique image processing technology
Source: 3D MEDiA Co., Ltd.
High-Speed Conveyor TrackingHS High-speed picking of court-plaster boxes, easily automating mixed type production and reducing costs
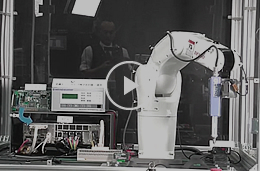
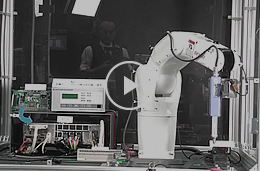
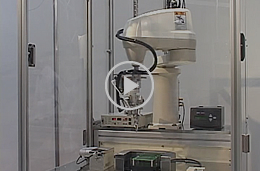
Random Shaft PickingVS-6556/6577 Picking up randomly placed shafts with an imaging device and inserting them into a deformed pallet
Source: Kondo Seisakusho Co., Ltd.
Conveyor TrackingHS Conveyor tracing function facilitating adjustment
3D Picking + External Appearance InspectionVS-6556/6577 Automating bulk picking to inspection/sorting with 3D picking and external appearance inspection units
Source: Mitsuteck
Conveyor TrackingHS Conveyor tracing function facilitating adjustment
Cooperative Transportation + Force Control SystemVS-050/060 Realizing heavy object transportation and coordinated fitting by combining the “coordination” and “force control” functions with two robots
3D Picking + External Appearance InspectionVS-6556/6577 Automating bulk picking to inspection/sorting with 3D picking and external appearance inspection units
Source: Mitsuteck
Random Shaft PickingVS-6556/6577 Picking up randomly placed shafts with an imaging device and inserting them into a deformed pallet
Source: Kondo Seisakusho Co., Ltd.
Network CameraHS New solution with robots and a network cameras
3D Picking + External Appearance InspectionVS-6556/6577 Automating bulk picking to inspection/sorting with 3D picking and external appearance inspection units
Source: Mitsuteck
Random Shaft PickingVS-6556/6577 Picking up randomly placed shafts with an imaging device and inserting them into a deformed pallet
Source: Kondo Seisakusho Co., Ltd.
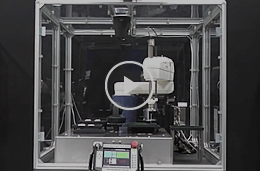
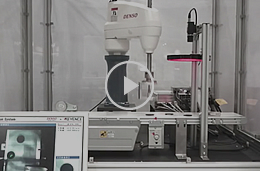
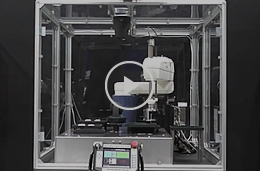
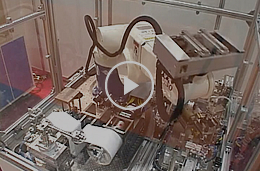
Automatic Assay Plate CreationVS-050S2 Proposing automated assay plate creation in drug discovery screening, realizing flexible robotic automation by performing multi-process operation including sealing, dispensing, centrifugal dehydration, and stocker delivery using robot traverse axes
3D Picking of Translucent Plastic ContainersVS-050/060 Realizing 3D picking of translucent plastic containers, which are usually difficult to recognize, using unique image processing technologySource: 3D MEDiA Co., Ltd.