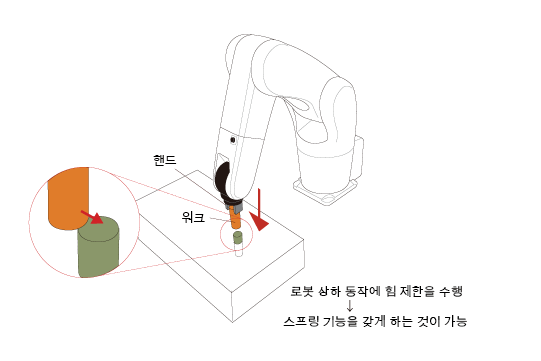
가압력을 조정하여 워크나 핸드를 과대한 힘의 부하로부터 보호합니다.
대응 로봇|VP・VS(VS-050/060/068/087/6556/6577)・VM
각 축의 모터에 돌아오는 힘을 제어로 사용하여 위치 오차를 흡수할 수 있습니다.
부품 간의 부딪힘, 끼워맞춤 등 대상물과 접촉을 수반하는 작업에 효과적입니다.
※당기능은 로봇이 사람에게 충돌·접촉했을 때에, 그 힘을 저감 하는 안전 기능이 아닙니다.






덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)