最大TCP*速度は2,500mm/sと、協働ロボットトップクラス。高速運転時は垂直多関節ロボットさながらの速度で稼働します。軽量でスリムなアームの各軸に、独自開発の高剛性トルクセンサを搭載することで加速度を向上。配管・配線は機内先端まで通すことで高ユーザビリティを実現しました。 *Tool Center Pointの略。エンドエフェクターが対象物に触れる点の中心のこと。
| ロボット | タッチセンシング ソフトカバー |
協働状態 | 非協働状態(高速運転) | |
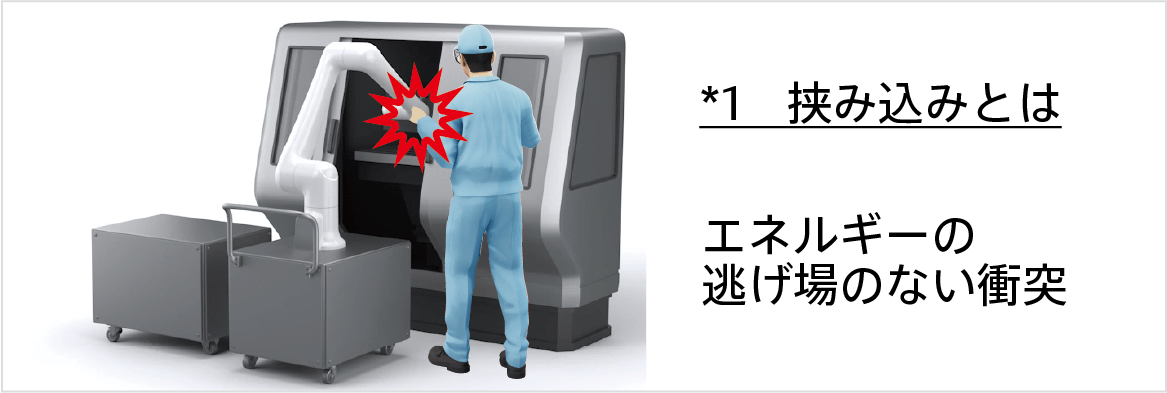
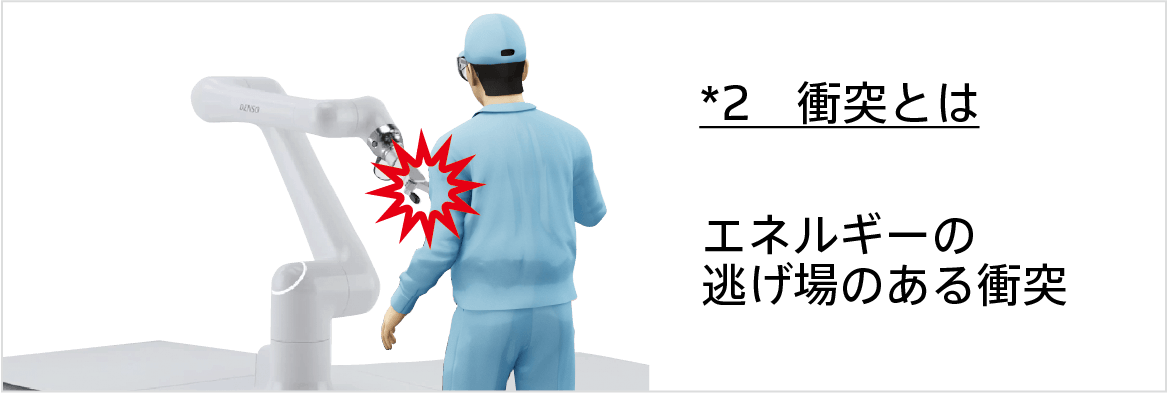
| 挟み込み*¹ | 衝突*² | |||
| COBOTTA PRO1300 | なし | 200mm/s | 1,800mm/s | 2,500mm/s |
| あり | 500mm/s | 2,000mm/s | ||
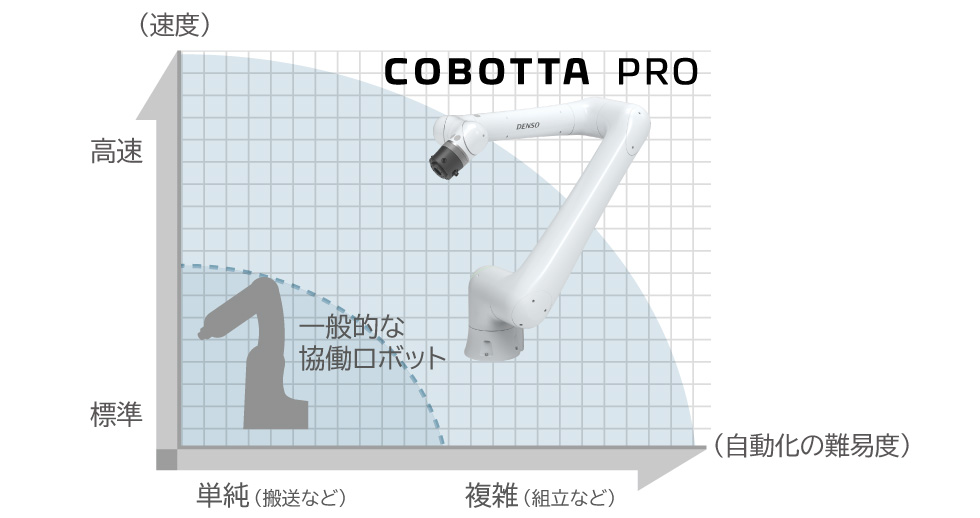
従来の協働ロボットは高速・高精度で稼働することが難しく、主に搬送などの単純作業の自動化で多く使用されてきました。 COBOTTA PROは高速性を追求し、また統合制御により高難度作業にも対応できるため、組立や検査などの複雑な工程の自動化も可能になります。従来の協働ロボットよりも自動化できる工程の幅が広がり、製造現場のさらなる生産性の向上に貢献します。

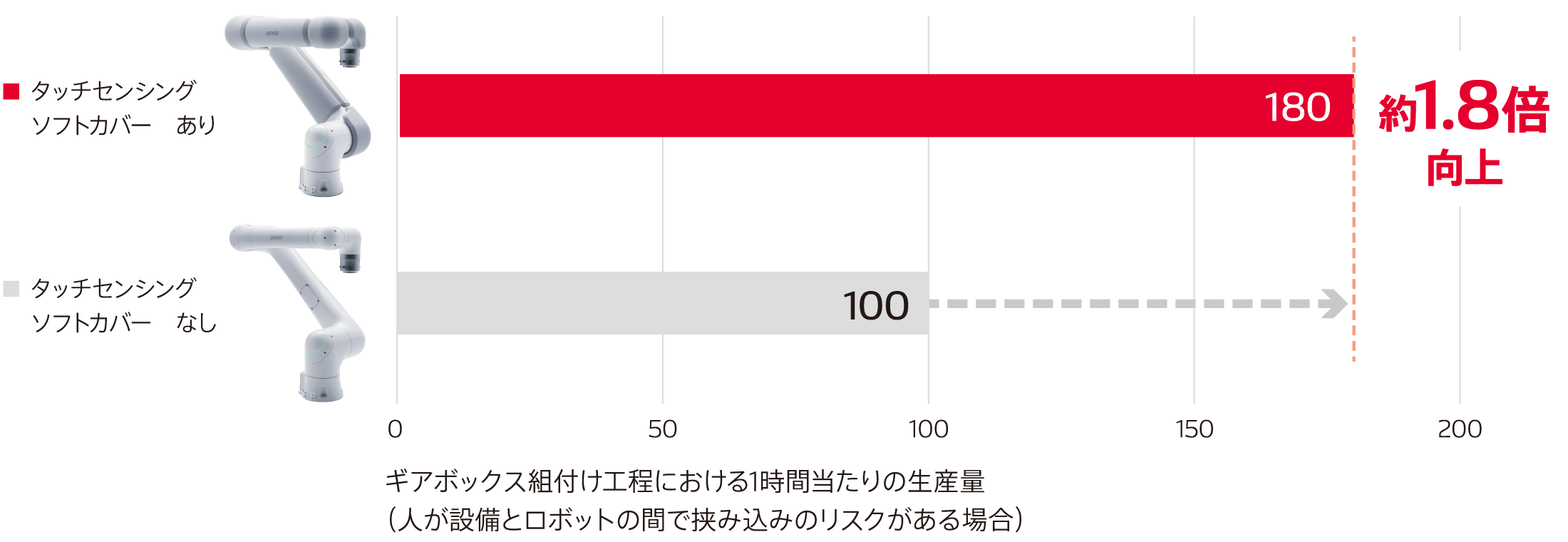
協働運転時の生産性をさらに上げたい時に
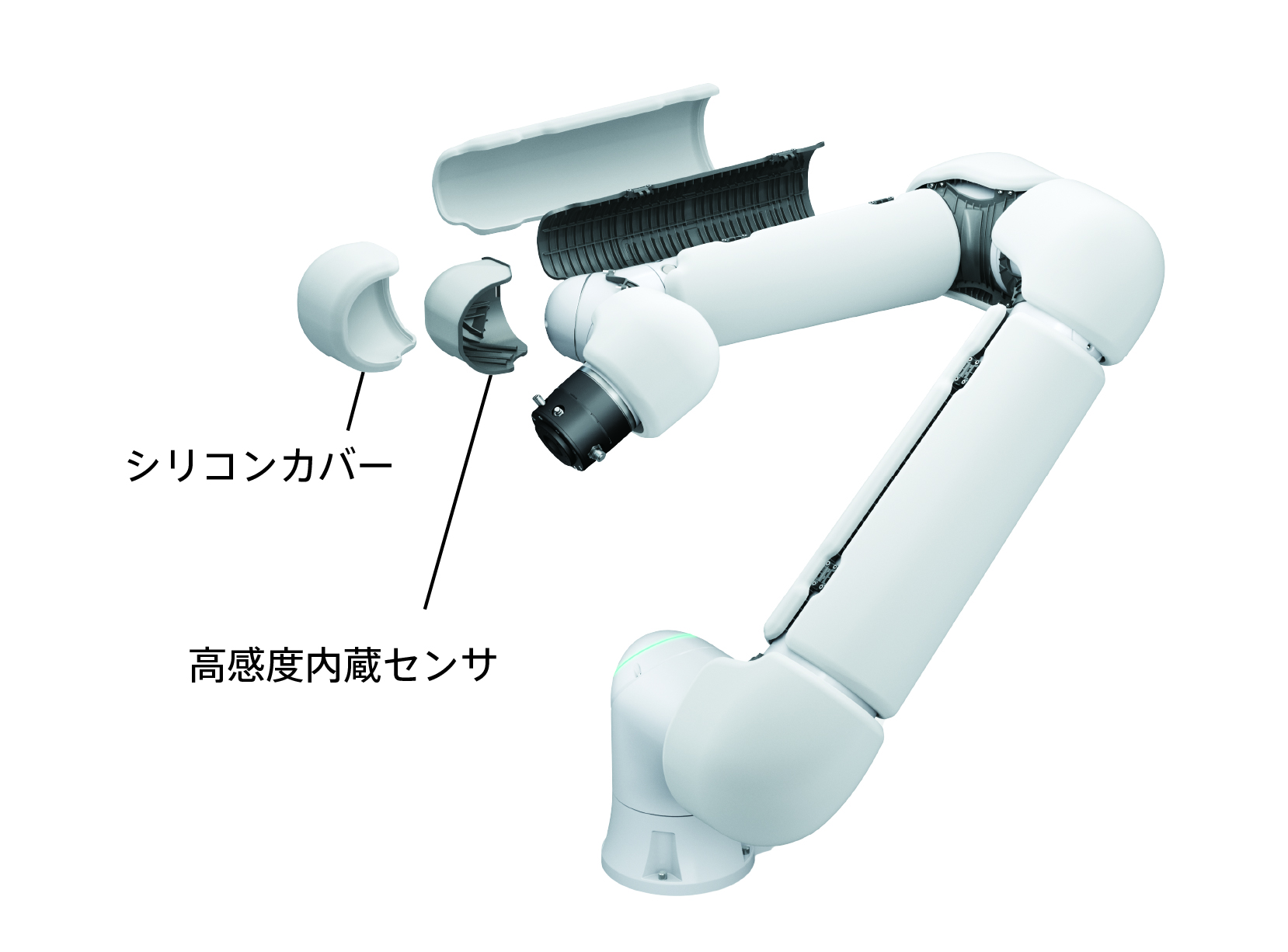
柔らかいシリコン部分と高感度内蔵センサの二重構造になっています。衝突を検出すると、高速に内蔵センサが反応し、ロボットを急停止させます。ソフトカバーが衝撃を吸収することで、人への衝撃力を抑える構造です。シリコン部分に突起を設けることで、高感度を実現しながらクッション性を高めました。その結果、ソフトカバーを装着することで、協働運転時の速度を向上することができます。
人が近づいたら低速になり、離れたときには高速で稼働。現場の状況に応じた最適な速度へCOBOTTA PROが調整します。状況に応じて運転速度を切り替えることで、無駄のない自動化を実現します。※別売りのセンサが必要です。


従来、制御性能の低下につながるトルクセンサの剛性不足を補うためには、速度や加速度を落とさざるを得ませんでした。私たちは、協働ロボットのさらなる高速性を求め、必要な要素を素材や構造から見直し、高速運転しても制御性能が低下しない超軽量・高剛性・高精度のトルクセンサ内蔵モジュールを開発しました。高出力モータの搭載を可能にし、加速度が高まることで協働ロボットトップクラスの高速性を実現しました。
高速・高精度なロボットを実現するためには、軽量化や剛性強化など様々な要素が求められます。小型垂直多関節ロボットを50年以上にわたり開発してきた経験や知識によって、スリムでコンパクトながらも高速稼働できるハイパワーなアームを実現しました。高速性・安全性の視点でこだわりぬいたデザインは、2022年グッドデザイン賞を受賞しました。




スリムなアーム内に、先端のフランジ部にまでエア配管やEthernet、信号線を配線しました。ケーブルの絡みによる断線リスクの低減・ダイレクトティーチング時の操作しやすさに貢献します。