최대 TCP* 속도는 2,500mm/s로 협동 로봇 톱 클래스. 고속 운전 시에는 수직 다관절 로봇과 비슷한 속도로 가동합니다. 가볍고 슬림한 암의 각 축에 독자 개발한 고강성 토크 센서를 탑재하여 가속도를 향상. 배관ㆍ배선은 기내 선단까지 통과시켜 높은 유저빌리티를 실현했습니다. *Tool Center Point의 약자. 엔드 이펙터가 대상물에 닿는 점의 중심을 말한다.
| 로봇 | 터치 센싱 소프트 커버 | 협동 운전 | 고속 운전 | |
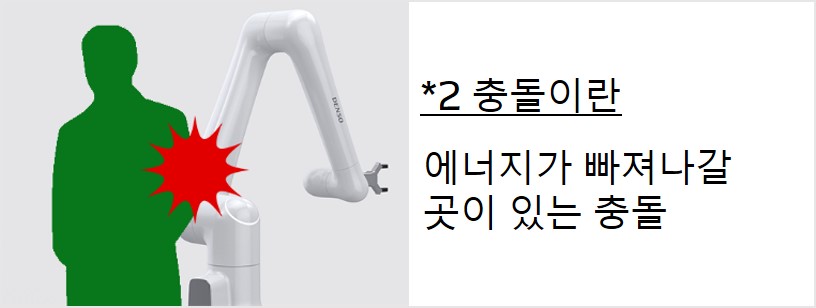
| 끼임*1 | 충돌*2 | |||
| COBOTTA PRO1300 | 없음 | 200mm/s | 1,400mm/s | 2,500mm/s |
| 있음 | 500mm/s | 2,000mm/s | ||

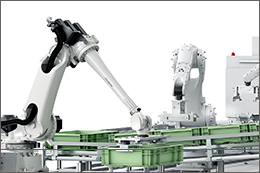
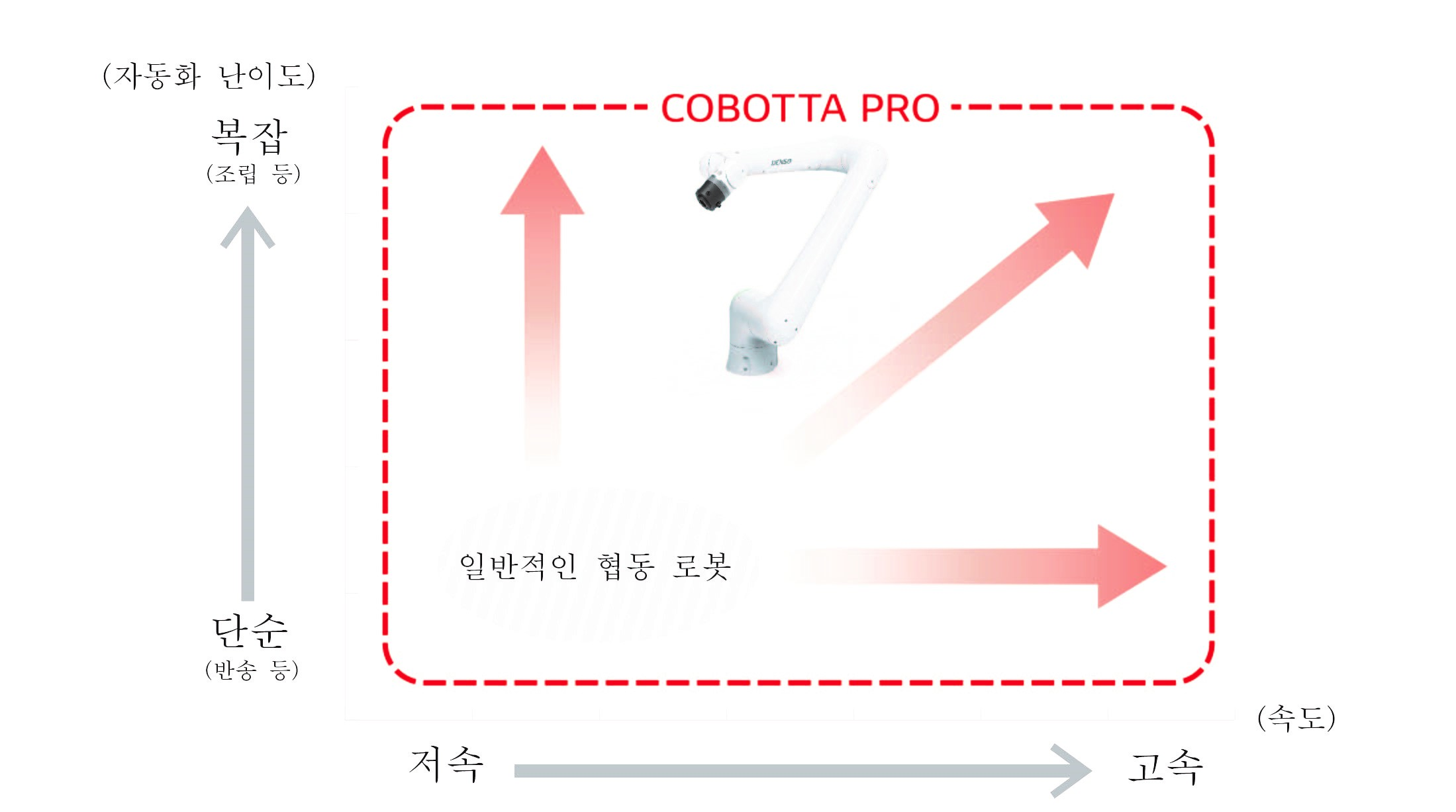
기존 협동 로봇은 고속ㆍ고정밀도로 가동하기 어려워 주로 반송 등의 단순 작업 자동화에서 많이 사용되어 왔습니다. COBOTTA PRO는 고속성을 추구하며 또한 통합 제어를 통해 고난도 작업에도 대응할 수 있으므로 조립이나 검사 등 복잡한 공정의 자동화도 가능합니다. 기존 협동 로봇보다 자동화할 수 있는 공정의 폭이 넓어져 제조 현장의 한층 더 발전된 생산성 향상에 공헌합니다.
협동 운전 시의 생산성을 더욱 올리고자 할 때
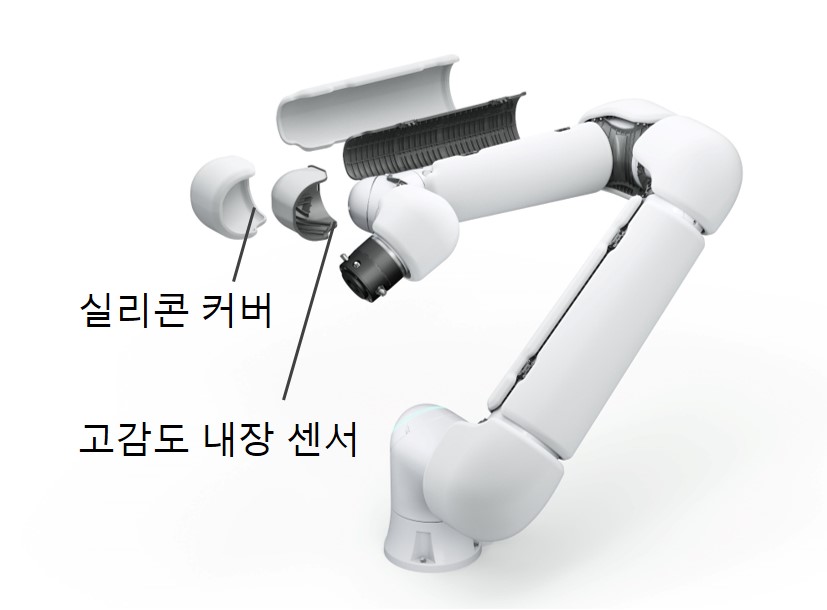
부드러운 실리콘 부분과 고감도 내장 센서의 이중 구조로 되어 있습니다. 충돌을 검출하면 고속으로 내장 센서가 반응하여 로봇을 급정지시킵니다. 소프트 커버가 충격을 흡수하여 사람에 대한 충격력을 억제하는 구조입니다. 실리콘 부분에 돌기를 설치하여 고감도를 실현하면서 쿠션성을 높였습니다. 그 결과, 소프트 커버를 장착하면 협동 운전 시의 속도를 향상시킬 수 있습니다.
사람이 가까워지면 저속이 되고, 멀어졌을 때는 고속으로 가동. 현장 상황에 따른 최적의 속도로 COBOTTA PRO가 조정합니다. 상황에 따라 운전 속도를 전환하여 효율적인 자동화를 실현합니다. ※별매 센서가 필요합니다.


기존에 제어 성능 저하로 이어지는 토크 센서의 강성 부족을 보완하기 위해서는 속도나 가속도를 낮출 수밖에 없었습니다. 저희는 협동 로봇의 더욱 뛰어난 고속성을 추구하여, 필요한 요소를 소재나 구조에서부터 재검토하여 고속으로 운전해도 제어 성능이 저하되지 않는 초경량ㆍ고강성ㆍ고정밀도의 토크 센서 내장 모듈을 개발했습니다. 고출력 모터를 탑재할 수 있게 하여 가속도가 높아져 협동 로봇 톱 클래스의 고속성을 실현했습니다.
고속ㆍ고정밀도 로봇을 실현하기 위해서는 경량화 및 강성 강화 등 다양한 요소가 요구됩니다. 소형 수직 다관절 로봇을 50년 이상에 걸쳐 개발해 온 경험과 지식을 통해 슬림하고 콤팩트하면서도 고속으로 가동할 수 있는 하이 파워 암을 실현했습니다. 고속성ㆍ안전성의 관점에서 심혈을 기울인 디자인은 2022년 굿 디자인상 을 수상했습니다.




슬림한 암 내부는 물론 선단의 플랜지부까지 에어 배관 및 Ethernet, 신호선을 배선했습니다. 케이블이 얽혀서 발생하는 단선 위험의 저감ㆍ다이렉트 티칭 시의 조작 용이성에 공헌합니다.






덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)