With a maximum TCP* speed of 2,500 mm/s, the COBOTTA PRO ranks among the industry’s fastest collaborative robots. Its speed is on par with that of a 5-and 6-axis robot during high-speed operation. Acceleration increases by mounting a proprietary, high-rigidity torque sensor on its lightweight, slim arm axes. Pneumatic lines and I/O wiring are routed inside the arm up to the flange to increase usability. *Tool center point: The center of the point at which the end effector comes into contact with the workpiece.
| Robot | Touch sensing soft cover |
Collaborative operation | High-speed operation | |
| Clamping*1 | Contact*2 | |||
| COBOTTA PRO 1300 | Without | 200mm/s | 1,800mm/s | 2,500mm/s |
| With | 500mm/s | 2,000mm/s | ||

Other collaborative robots have underperformed when operating at high levels of speed and precision and were primarily used to automate simple tasks like picking and transporting. The COBOTTA PRO works at high speeds and handles high-difficulty tasks through its integrated control; you can automate complex processes like assembly and inspection applications. As a result, the COBOTTA PRO can be used to automate a broader range of applications than other collaborative robots, allowing it to help realize further increases in productivity at manufacturing sites.


Maximizing productivity during collaborative operation
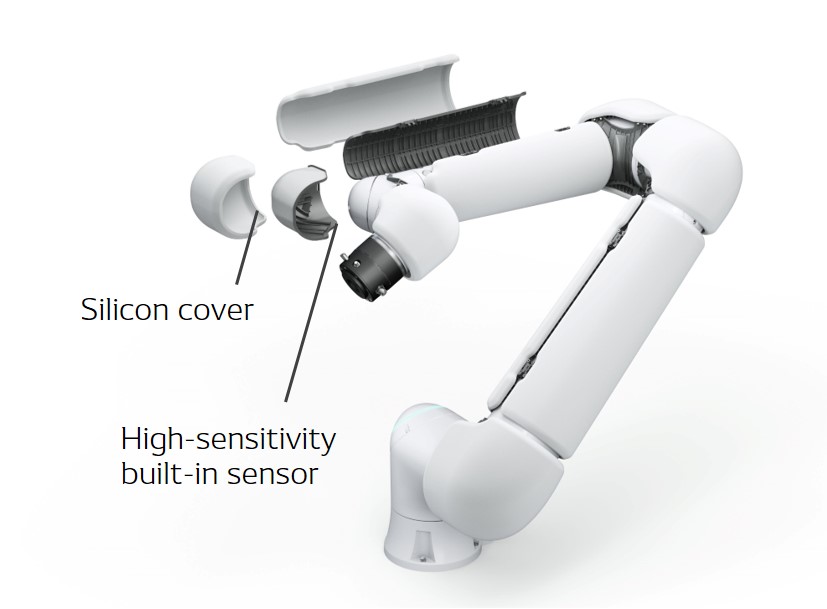
The touch sensing soft cover features a two-layer design consisting of a soft silicon cover and a high-sensitivity built-in sensor. When a collision is detected, the built-in sensor reacts at high speed to immediately stop the robot. The soft cover minimizes the impact force on human workers by absorbing the collision. Protrusions in the silicon cover increase cushioning while realizing high sensitivity. As a result, the installation of the softcover increased the maximum collaborative speed.
COBOTTA PRO slows down when an operator approaches it and speeds up when the person moves away. By switching the operating speeds according to the situation, a streamlined automated process can be achieved. *Requires sensor (sold separately).


The insufficient rigidity of torque sensors compromised control performance by having to reduce speed and acceleration. Recognizing the need to maximize the motion speed of collaborative robots, we reassessed requirements based on materials and structure. We developed a super-lightweight, high-rigidity, high-precision torque sensor module that doesn’t exhibit a reduction in control performance, even during high-speed operation. The sensor makes it possible to use high-output motors and increase acceleration, helping realize some of the highest speeds of any collaborative robot.
Delivering a high-speed, high-precision robot means satisfying a variety of requirements, for example, reduced weight and increased rigidity. Drawing on experience and expertise accumulated over 50 years of developing compact, 5-and 6-axis robots, we realized a high-power arm capable of high-speed operation despite its slim, compact size. The design, which focused on high speed and safety, earned a Good Design Award in 2022.




Air piping, Ethernet, and signal wires are installed inside the slim arm, all the way up to the flange on its end. This reduces the risk of wiring breaks.






If you have not registered
The services on this member site are available only for registered customers.