最大TCP*速度为2,500mm/s,处于协作机器人的顶级。高速运行时工作速度堪比垂直多关节机器人。轻巧纤细的机械臂各轴上都搭载有独立开发的高刚性扭矩传感器,可提升加速度。配管、配线通至机内前端,可实现高通用性。 *Tool Center Point的缩写。指末端执行器与对象物接触点的中心。
| 机器人 | 接触式 传感软壳 |
协作运行 | 高速运行 | |
| 夹击*1 | 冲撞*2 | |||
| COBOTTA PRO 1300 | 无 | 200mm/s | 1,800mm/s | 2,500mm/s |
| 有 | 500mm/s | 2,000mm/s | ||

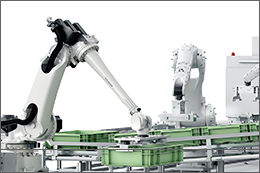
以往的协作机器人都难以高速度、高精度工作,大多用在搬运等单纯的工作的自动化上。COBOTTA PRO追求高速性,同时通过统一控制还能胜任高难度工作,也可实现组装或检查等复杂工序的自动化。相较于以往的协作机器人,它能自动化的工序范围更广,有助于进一步提升生产现场的生产效率。


如想进一步提升协作运行时的生产效率

具备柔软硅胶部分与高灵敏度内置传感器的双重结构。一旦检测到冲撞,内置传感器就会高速做出反应,可紧急停止机器人。利用感应皮肤吸收冲击,可减少对人的冲击力。硅胶部分设计为凸起,在实现高灵敏度的同时,提升缓冲性能。因此可通过安装,提升协作运行时的速度。
一旦有人靠近就会降低速度,人离开时就会高速工作。COBOTTA PRO会根据现场的状况调整至最适合的速度。通过根据状况切换运行速度,实现高效的自动化。※需要另售的传感器。


以往,扭矩传感器控制性能都较差,为补足刚性不足的缺点,不得不降低速度和加速度。我们为进一步提高协作机器人的高速性,从材料、结构等方面重新评估高速性所必须的要素,开发出即使是在高速运行也不会降低控制性能的超轻巧、高刚性、高精度的扭矩传感器内置模块。机体可搭载高输出的电机,以提升加速度,使协作机器人实现顶级的高速性。
机器人要实现高速和高精度,需要满足轻量化、强刚性等多项要求。公司凭借在小型垂直多关节机器人领域的超50年的开发经验与知识,研制出纤细紧凑且能够高速工作的高性能机械臂。凭借在高速性和安全性上精益求精的设计,荣获2022年的GOOD DESIGN奖。




纤细的机械臂内布有延伸至前端法兰部位的空气配管、Ethernet和信号线。有助于降低电缆缠绕带来的断线风险以及直接示教时的操作难易度。





为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)