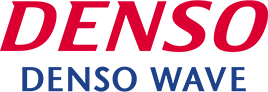
最大TCP*速度为2,500mm/s,处于协作机器人的顶级。高速运行时工作速度堪比垂直多关节机器人。轻巧纤细的机械臂各轴上都搭载有独立开发的高刚性扭矩传感器,可提升加速度。配管、配线通至机内前端,可实现高通用性。
*Tool Center Point的缩写。指末端执行器与对象物接触点的中心。

COBOTTA PRO的开发着重于保持高安全性的同时兼顾高速工作,进一步提升生产效率。机械臂的设计除充实基本功能外,还开发了新的“场景功能”。另外,利用提升安全性的选项品,还能提升协作运行时的速度,提高生产效率。

直接示教能直观地在短时间内进行示教,我们为充分发挥其优点,除基本功能外,还开发出追求易用的COBOTTA PRO专用新示教编程系统。利用充实的各项功能,甚至可以执行在传统的直接示教上难以进行的微调。本机的示教系统可以在短时间内实现精密的示教,而易用的编程系统更是让机器人新手不仅能自动化单纯的工序,甚至能自动化稍微复杂的工序,两者共同助力简单自动化。

COBOTTA PRO适配以机器人控制器“RC9”为基础的“CRC9”。与RC9一样,可以实现设备综合控制,及综合开发环境。另外,结合我们提供的3D视觉系统、通用AI软件,可帮助实现比以往更高难度的人工工作的自动化。
| 项目 | 单位 | 规格 | ||
| 机型名称 | - | COBOTTA PRO 900 | COBOTTA PRO 1300 | |
| 轴数 | - | 6 | ||
| 位置检测方式 | - | 绝对编码器 | ||
| 驱动电机 | - | 全轴AC伺服电机 | ||
| 制动器 | - | 全轴带制动器 | ||
| 最大动作区域 (P点:J4、J5、J6轴中心) |
mm | 908 | 1,304 | |
| 机械臂全长 (第1机械臂+第2机械臂) | mm | 900 | 1,300 | |
| 最大伸臂长度 | mm | 1,066 | 1,463 | |
| 动作角度 | J1轴 | deg | ±270 | ±270 |
| J2轴 | ±150 | ±150 | ||
| J3轴 | ±150 | ±150 | ||
| J4轴 | ±270 | ±270 | ||
| J5轴 | ±150 | ±150 | ||
| J6轴 | ±360 | ±360 | ||
| 最大可搬运质量 | kg | 6 | 12 | |
| 協働状態時最大速度 | 无接触式传感软壳 | mm/s | 1,800 | |
| 有接触式传感软壳*¹ | 2,000 | |||
| 最大TCP平移速度 (非协作状态时) | mm/s | 2,100 | 2,500 | |
| 重复定位精度 (工具安装面中心)*² | mm | X、Y、Z各方向:±0.03 | X、Y、Z各方向:±0.04 | |
| 最大容许扭矩 | 第4轴 (旋转) | Nm | 20 | 38.5 |
| 第5轴 (旋转) | 14.6 | 28 | ||
| 第6轴 (旋转) | 6.5 | 12 | ||
| 最大容许转动惯量(惯性矩) | 第4轴 (旋转) | kgm² | 0.8 | 1.45 |
| 第5轴 (旋转) | 0.45 | 0.9 | ||
| 第6轴 (旋转) | 0.1 | 0.35 | ||
| 连接器面板 | - | 机器人基座背面 (机器人基座的底面为可选项) | ||
| 工具专用附件 | - | 信号线:2芯 (空气配管型) ,8芯 (直通配线型)*³ Ethernet电缆:1根 (8芯) *⁴ 模拟输入:2系统 / RS-485:1系统 机械手输入:5芯,机械手输出:5芯 照明:1系统 电源+ (OFF/12V/24V切换) 、电源- (0V) |
||
| 用户空气配管 | - | Φ4X2(选择空气配管时) | ||
| 空气源 | 常用压力 | Mpa | 0~0.39 | |
| 容许最大压力 | 0.49 | |||
| 防护等级 | - | IP54 (防尘防溅型) | ||
| 洁净度 (ISO 14644-1) | - | Class 5 (洁净型) | ||
| 设置环境条件 (运行时) | 无接触式传感软壳 | - | 环境温度:0~50 ℃ | |
| 有接触式传感软壳*¹ | 环境温度:5~45 ℃ | |||
| 相对湿度:20~90 % (不可凝结) 振动:4.9 m/s2 (0.5 G)以下 |
||||
| 噪音 (等效声级[A特性]) | dB | 65以下 | ||
| 污损度 (IEC 60664-1) | - | 3 | ||
| 最机体质量 | 无接触式传感软壳 | kg | 约29 | 约41 |
| 有接触式传感软壳 (全套)*¹ | 约35 | 约50 | ||
| 有接触式传感软壳 (半套)*¹ | 约32 | 约45 | ||
| 适用标准 | - | ISO 10218-1:2011 ISO 13849-1:2015 ISO/TS 15066:2016 IEC 60204-1:2016/A1:2021 EN 61000-6-2:2005 EN 61000-6-4:2007/A1:2011 EN 61000-6-7:2015 |
||

| 连接器面板 底面的规格 | 连接本体的各种线缆(本体间线缆等)的安装方向变更为从底部出线。 |
| 制动器解除单元 ※请配置适当数量的刹车解除装置,在紧急以及异常时候可以立刻使用。标准适合IS010218-1以及IS010218-2。 |
制动器解除单元是解除机器人各轴制动器的设备。 |
| 外装电池单元 ※触碰传感软盖 安装整套设备时需要使用。 |
通过使用外装电池单元,可将通常内置于机器人本体中的编码器备份电池连接到机器人的外部。因此,可简单更换编码器备份电池。 |



为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)