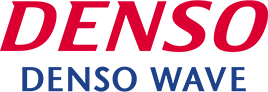
COBOTTA PRO的臂是减少凹凸的圆弧设计,以降低万一发生冲撞时的风险。另外,机器人关节部位的结构能避免将手卷入。

| 功能名称 | 功能概要 | 内容 |
| Safe Torque Off (STO) | 即时切断动力(停止范畴0) | 切断机器人的动力。 |
| Safe Operating Stop (SOS) | 监视停止 | 监视机器人的停止状态。维持机器人的电力供应。 |
| Safe Output Control (SOC) | 安全状态的外部输出 | 输出安全状态。 |
| Safe Stop 1 (SS1) | 控制停止后,切断动力(停止范畴1) | 机器人控制停止后,进入到STO状态。 |
| Safe Stop 2 (SS2) | 控制停止后,监视停止(停止范畴2) | 机器人控制停止后,进入到SOS状态。 |
| Safety-Limited Speed (SLS) | 监视电机速度 | 监视各轴速度的功能。将动作速度控制在设置速度范围内。超出设置速度时,将以SS1状态停止。 |
| Safety-Limited Position (SLP) | 监视电机角度 | 监视各轴的动作范围。超出设置角度时,将以STO状态停止。 |
| Robot-Limited Speed (RLS) | 监视机器人速度 | 视机器人的速度。将法兰中心、TCP和机械臂上的监视点的速度控制在设置速度范围内。超出时,将以SS1状态停止。 |
| Robot-Limited Position (RLP) | 监视机器人动作范围 | 监视机器人的位置。将法兰中心、TCP和机械臂上的监视点控制在动作范围内。超出时,将以STO状态停止。 |
| Robot-Limited Orientation (RLO) | 监视机器人姿势 | 监视机器人手部的姿势。限制机器人的动作,以免工具姿势变化超出限制角度。超出时,将以SS1状态停止。 |
| Safety-Limited Torque (SLT) | 监视机械臂扭矩 | 监视各轴的扭矩。将机器人各轴的扭矩控制在设置值内。超出时,将以SS1状态停止。 |
| Robot-Limited Force (RLF) | 监视机器人的力 | 监视机器人的力。将加在TCP上的力度控制在设置值内。超出时,将以SS1状态停止。 |

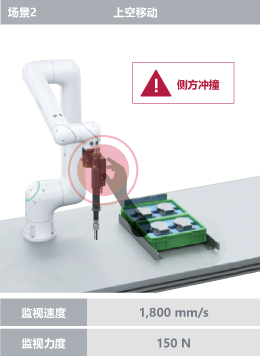


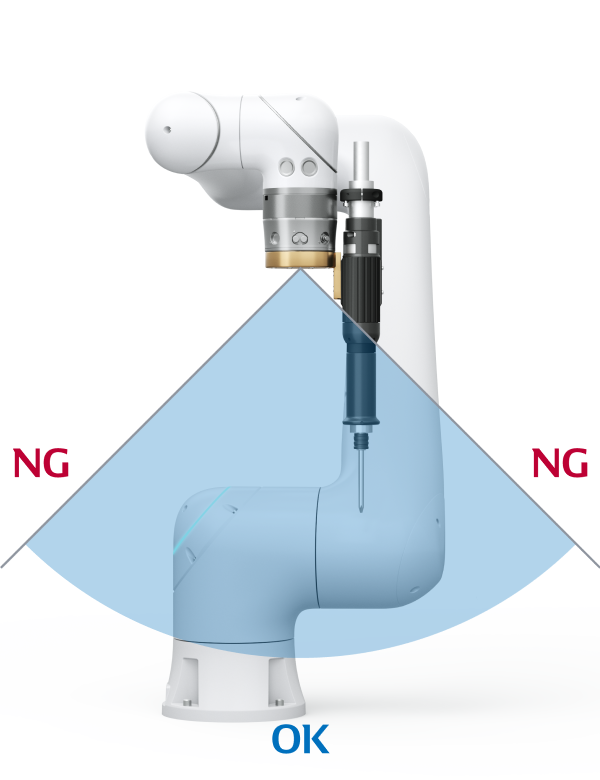
RLO(Robot-limited Orientation)功能是指控制末端执行器姿势的功能。以往,安装有锐利部位的末端执行器后,都存在在风险评估上难以证明其安全性的问题。 在COBOTTA PRO上,结合RLO功能和场景功能,关联机器人前进方向与末端执行器的姿势限制,可避免发生与人的危险冲撞,更容易通过风险评估。

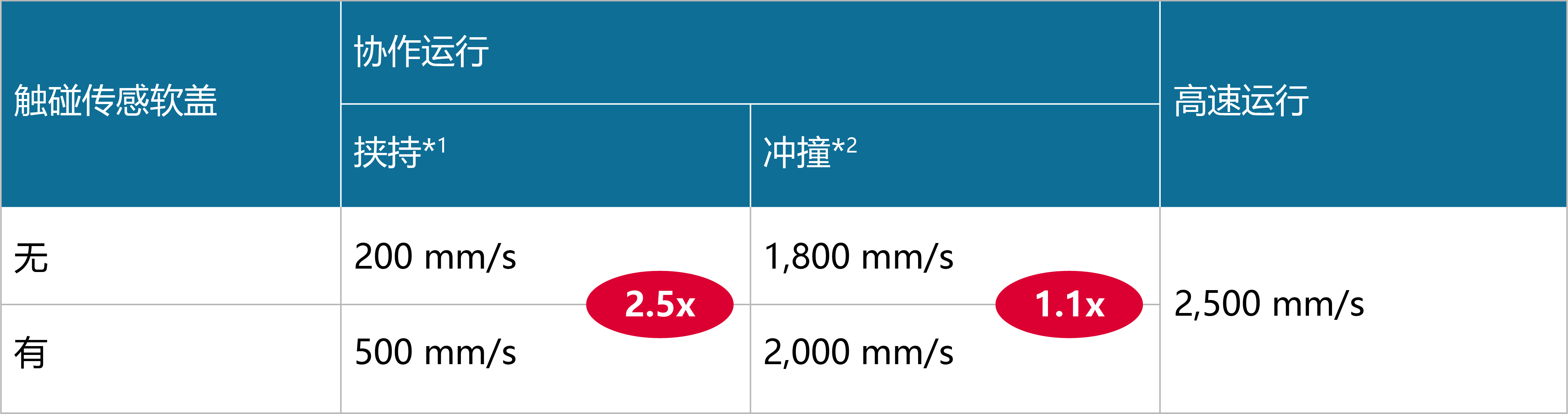
即便全部安装,与通用性的软壳相比,也是非常纤细。有着柔软硅胶部分与高灵敏度内置传感器的双重结构。一旦检测到冲撞,内置传感器就会高速做出反应,紧急停止机器人。利用软壳吸收冲击,可减少对人的冲击力。硅胶部分设计为凸起,在实现高灵敏度的同时,提升缓冲性能。带来的是可通过装备软壳,提升协作运行时的速度。当然,COBOTTA PRO即便没有软壳,也可以作为协作机器人使用。
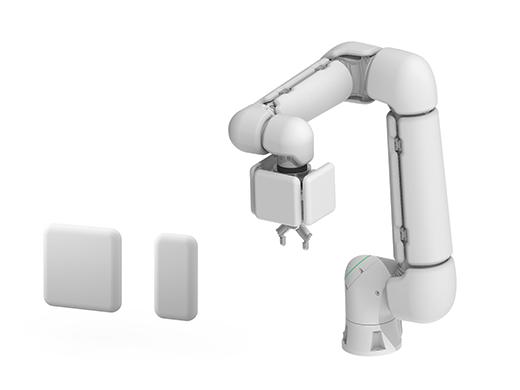
有两种不同尺寸的末端执行器用外壳。请根据末端执行器的形状选择使用。只要有一处锐利部位,RLO功能就会生效,但锐利部位较多时,可装上末端执行器用外壳,以避免高压力带来的冲撞。由于搭载了接触式传感器,所以能监测冲撞,停止机器人。





为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)