
我们有两种协作机器人。
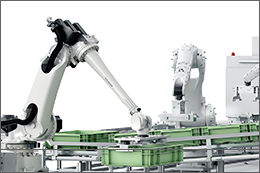
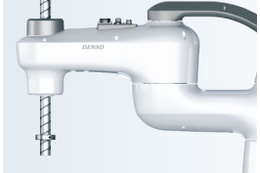
COBOTTA PRO追求的是利用人机协作持续提高生产效率。它的最大伸臂长度为 1463毫米,最大TCP平移速度为 2500毫米/秒。
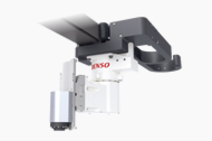
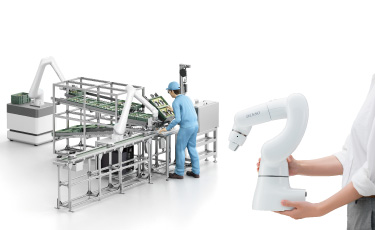
COBOTTA 随时,随地,轻松自如。 是一个与人合作的机器人。主机重 4千克,重量轻,易于安装。
两者都是,不仅适用于工厂,也适用于教育和研究机构。 请选择最适合您的应用的设备。


最大TCP*速度为2,500mm/s,处于协作机器人的顶级。高速运行时工作速度堪比垂直多关节机器人。轻巧纤细的机械臂各轴上都搭载有独立开发的高刚性扭矩传感器,可提升加速度。配管、配线通至机内前端,可实现高通用性。
*Tool Center Point的缩写。指末端执行器与对象物接触点的中心。

COBOTTA PRO的开发着重于保持高安全性的同时兼顾高速工作,进一步提升生产效率。机械臂的设计除充实基本功能外,还开发了新的“场景功能”。另外,利用提升安全性的选项品,还能提升协作运行时的速度,提高生产效率。

直接示教能直观地在短时间内进行示教,我们为充分发挥其优点,除基本功能外,还开发出追求易用的COBOTTA PRO专用新示教编程系统。利用充实的各项功能,甚至可以执行在传统的直接示教上难以进行的微调。本机的示教系统可以在短时间内实现精密的示教,而易用的编程系统更是让机器人新手不仅能自动化单纯的工序,甚至能自动化稍微复杂的工序,两者共同助力简单自动化。

COBOTTA PRO适配以机器人控制器“RC9”为基础的“CRC9”。与RC9一样,可以实现设备综合控制,及综合开发环境。另外,结合我们提供的3D视觉系统、通用AI软件,可帮助实现比以往更高难度的人工工作的自动化。


无需安全防护栅的人机协作机器人。防止夹伤的独特机械臂 构造,无锐利部分的外观设计。另外,6个可动部位均内置传感器,
实时监控速度与纽矩,从功能层面保证安全性。(预计通过第三方机构取得认证)

可轻松搬运的约4kg自重,同时拥有500g的可搬运重量。加之 一体式的控制器设计,在削减配线之外,并且可以与外部设备实现统一控制。标准搭载ORiN。。

支持直接示校功能,可 实现直观操作的GUI,编程工作也更简便。装载选配件相机后,可通过相机实现示校工作。

开放内嵌式控制器,同时开放COBOTTA控制用API,开发者可通过自由的开发环境进行原生应用的开发工作。(OSS版)
| 机型名称 | COBOTTA PRO 900 | COBOTTA PRO 1300 | COBOTTA |
| 轴数 | 6轴 | 6轴 (臂) +1轴 (电动夹爪)*¹ |
|
| 制动器 | 全轴带制动器 | 1、2、3、4、5轴带制动器 | |
| 臂全长 (第1机械臂+第2机械臂) |
900mm | 1300mm | 342.5mm |
| 额定可搬运质量 (最大可搬运质量) |
6kg | 12kg | 0.5kg (手腕部向下±10度以内时0.7kg)*² |
| 最大容许转动惯量 | 第4轴:0.8kgm² 第5轴:0.45kgm² 第6轴:0.1kgm² |
第4轴:1.45kgm² 第5轴:0.9gm² 第6轴:0.35kgm² |
第4轴:0.0065kgm² 第5轴:0.0047kgm² 第6轴:0.0012kgm² |
| 重复定位精度*³ | ±0.03mm | ±0.04mm | ±0.05mm |
| 保护等级 | IP54 (防尘防溅型) | COBOTTA本体:IP30 AC适配器、AC线:IP20 |
|
| 洁净度 (ISO14644-1) |
Class 5 (洁净型) | - | |
| 设置环境条件 (运行时) | 环境温度:0~50℃ 相对湿度:20~90% (不可凝结) 振动:4.9m/s² (0.5G)以下 |
环境温度:0~40℃ 相对湿度:20~80% (不可凝结) |
|
| 本体质量 | 约29kg | 约41kg | 约4kg |
| 安全规格 | ISO 10218-1:2011, ISO 13849-1:2015, ISO/TS 15066:2016, IEC 60204-1:2016/A1:2021 EN 61000-6-2:2005, EN 61000-6-4:2007/A1:2011 EN 61000-6-7:2015 |
标准版:ISO 10218-1:2011, ISO/TS 15066:2016, ISO 13849-1:2015 PL d, Cat. 3 OSS版:ISO 13849-1:2015 PL d, Cat. 3 |
|
| 噪音 (等效声级[A特性]) |
65dB以下 | 55dB以下 (额定负载、按出厂时的最高速度测量) |
|
| 污损度 (IEC 60664-1) |
3 | 2*⁴ | |



为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)