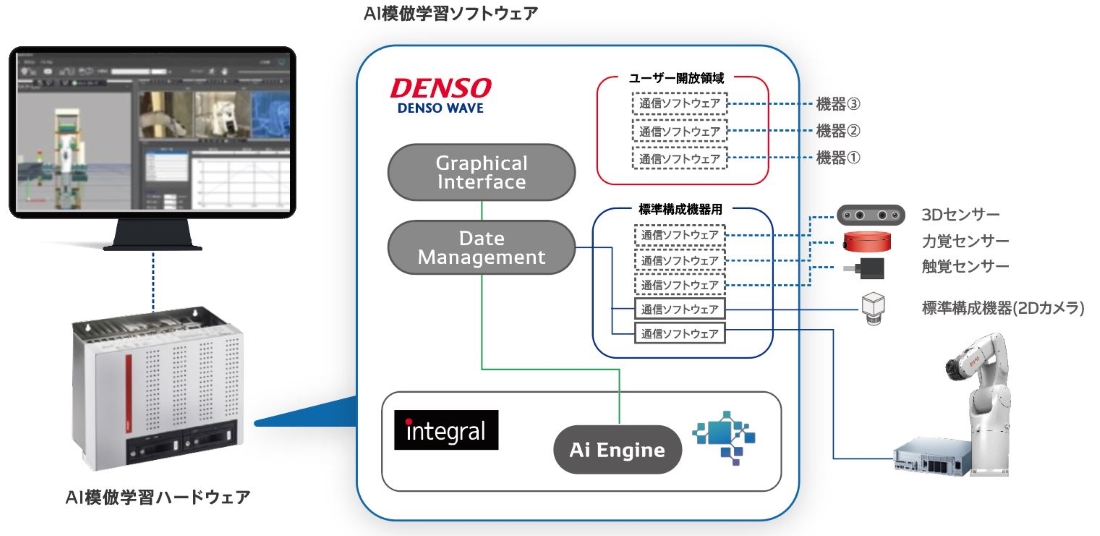
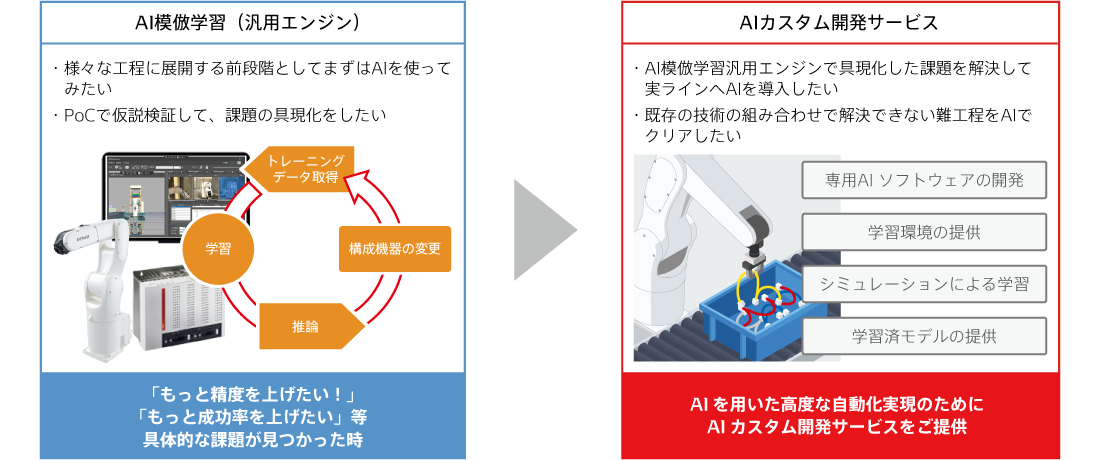
AIにロボット動作の手本を見せると、AIが手本を模倣して自律的に動き出すことを実現した汎用ソフトウェアです。

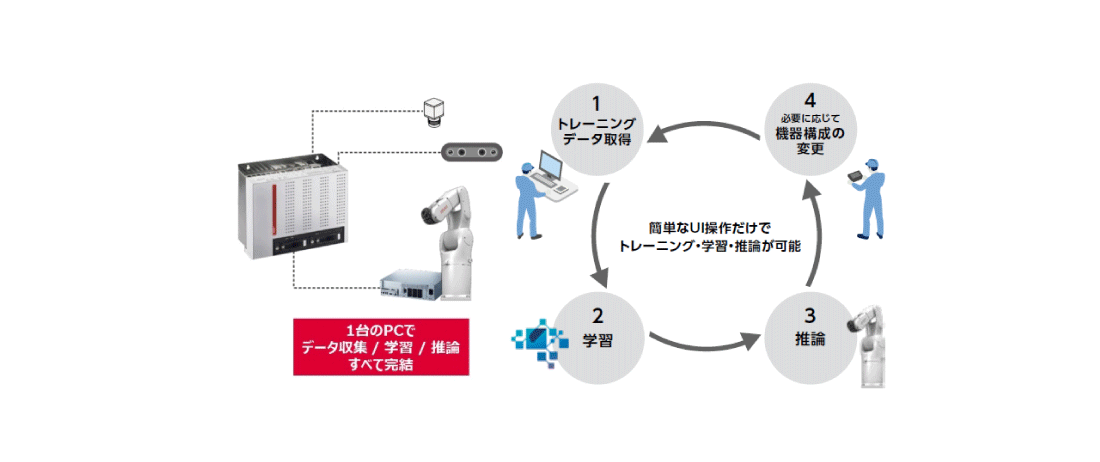
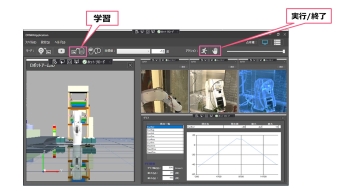
トレーニングデータの取得や学習、推論は専用ユーザーインターフェースで簡単に操作できます。
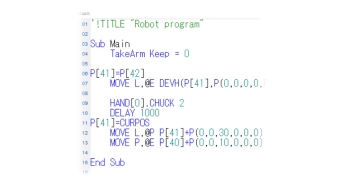
プログラムを使用すると、ロボットの軌道にブレ(ノイズ)が無いため良質なトレーニングデータが収集しやすくなります。
トレーニングデータのN増しも簡単にできます。

操作デバイスを使用すると、状況を確認しながらロボットの動作変更が可能です。
ロボットに関する知識がなくても直観的な操作が可能になります。
ティーチングペンダントやオプションのミラー制御機能で操作できます。
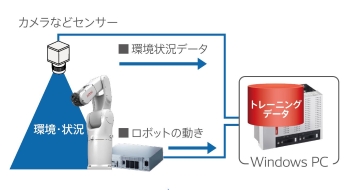
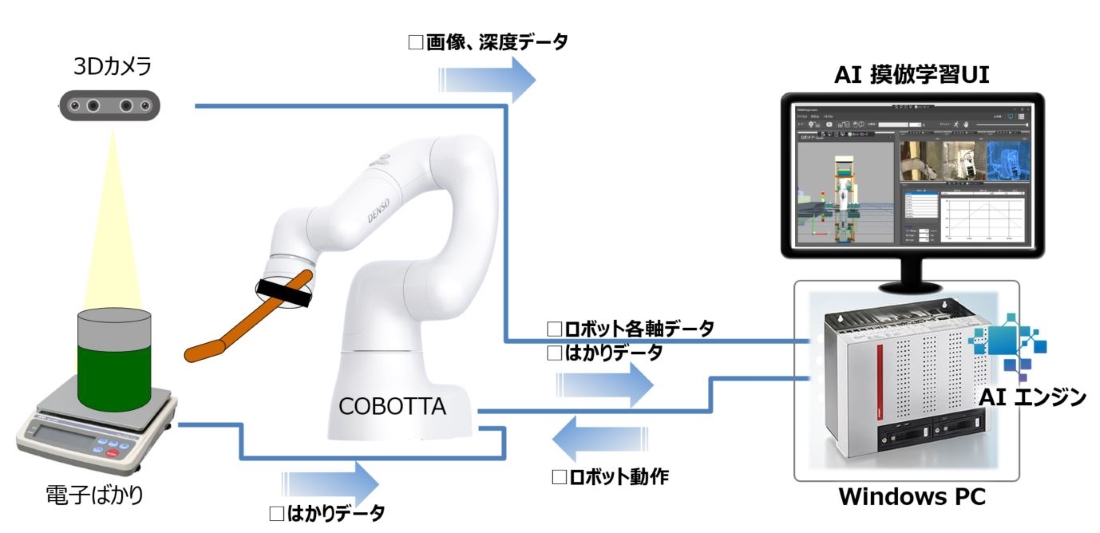
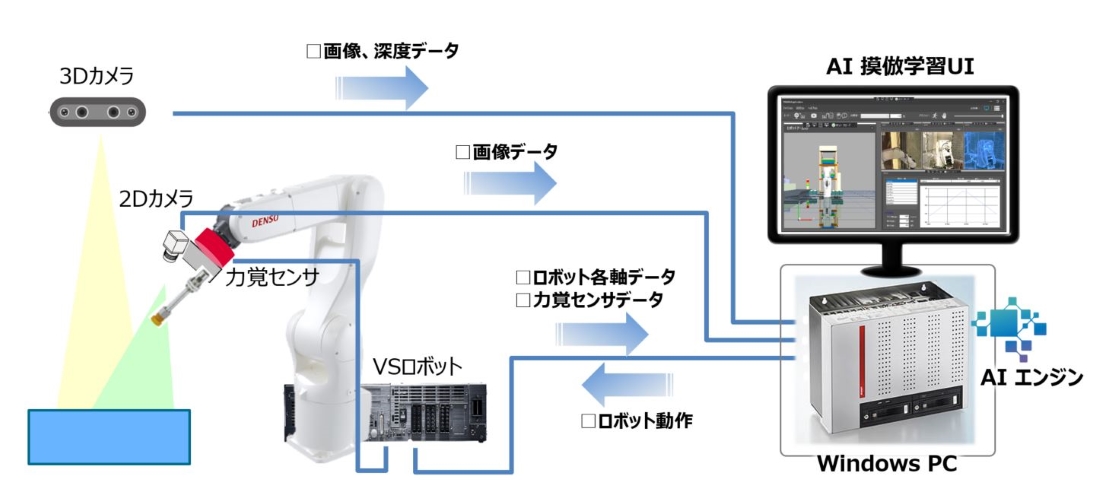
模倣させたい動きをロボットにさせて、その時の「ロボットの動き」と「環境・状況変化」をトレーニングデータとして取得します。
データの取得は様々なセンサーやカメラを使用します。
トレーニング方法
・プログラミングによる方法
・操作デバイスによる方法(ミラー制御/ティーチングペンダント等)
集めたトレーニングデータから推論モデルを生成します。
実行はUI画面のボタンを押すだけです。
・学習時間を短くするテスト学習モード(収束計算を途中で切り上げます)
・取得したトレーニングデータから、不要なデータを取り除く設定が可能
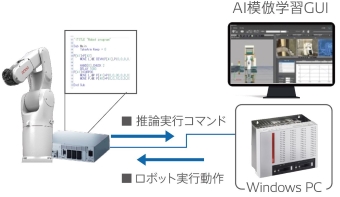
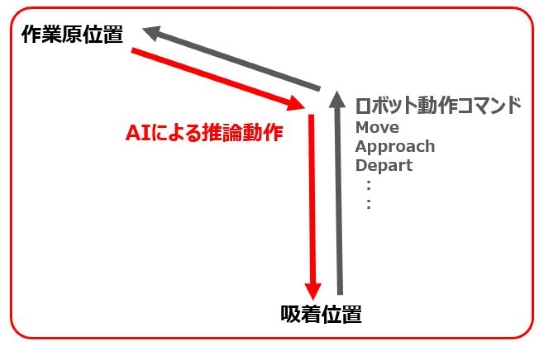
現在の環境・状況からAIが未来の動作を推論、動作命令を発行しロボットを動作させます。
■実行方法
ロボットプログラムから実行する方法
デンソーロボットプログラムPacScriptから
・推論モデルを選択
・推論実行コマンドを実行
・推論終了コマンドを実行
GUIから実行する方法
・推論モデルを選択
・推論ボタンを押す
|
AI模倣学習用IPC |
||
|---|---|---|
| OS | Windows10 | |
| CPU | Intel® CoreTM i7-7700,3.6GHz,4cores | |
| メモリー | 32 GB DDR4 | |
| HDD | 1TB | |
| 電源 | 100-240 V AC, 600 W | |
| グラフィックカード | NVIDIA Quadro P2200 | |
| 製品・サービス項目 | 説明 | |
|---|---|---|
| 学習・推論パッケージ | AI模倣学習 2021/学習・推論パッケージ | パソコン用ソフト(学習・推論)ライセンス ①トレーニング(1日)、②バグフィックス(3年間) ③問い合わせ対応、④動作環境設定支援 |
| AI模倣学習 2021/学習・推論パッケージ メジャーバージョンアップ |
機能追加を伴うバージョンアップ | |
| AI模倣学習 2021/学習・推論パッケージ マイナーバージョンアップ |
品質、機能向上のバージョンアップ | |
| AI 模倣学習 2021/学習・推論アカデミックパッケージ | パソコン用ソフト(学習・推論)ライセンス ①トレーニング(1日)、②バグフィックス(3年間) ※教育機関向け |
|
| 推論 | AI模倣学習 2021/推論 | パソコン用ソフト(推論)ライセンス 同じ学習済みモデルで2台目以降のロボットを動作させる場合に使用 |
| AI模倣学習 2021/推論 メジャーバージョンアップ | 機能追加を伴うバージョンアップ | |
| AI模倣学習 2021/推論 マイナーバージョンアップ | 品質、性能向上のバージョンアップ | |
| AIカスタム開発サービス | 都度内容を決定しご契約 | |
お客様のニーズに合わせて当社がAIをカスタマイズし、今まで困難とされてきた工程の自動化を実現するサービスです。
柔軟物・不定形物の取り扱いや、場合分けが多いために自動化が難しかった工程など、
自動化を諦めていた作業をぜひご相談ください。
・ばら積みピッキング
・モデルレス認識
・把持精度向上
・最適な箱詰の推論 など
・コネクタの把持
・コネクタ挿入
・ケーブルの引き回し
・ケーブルをスナップに停める など
・多品種少量ラインへの対応
・プロジェクトごとの制度要求への対応 など

・3次元形状の認識と切断面の決定
・切断面に合わせたロボット動作の生成 など
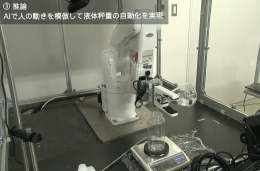
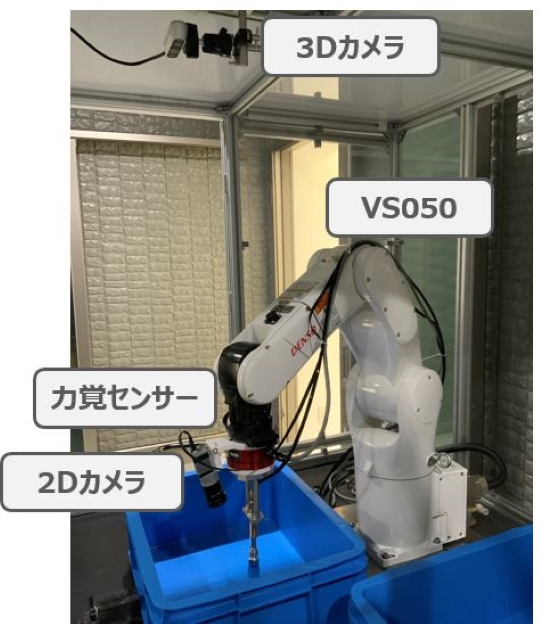
茶筒から抹茶の粉体を掬うアプリケーション
・推論動作
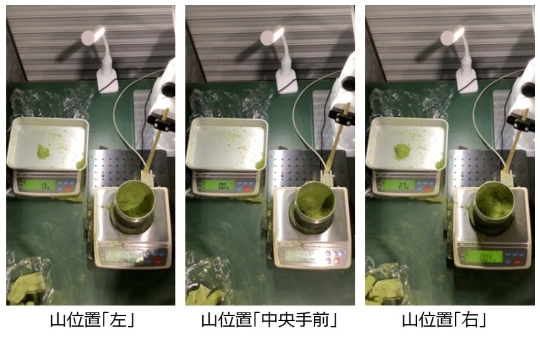
①粉体の山を狙って掬う
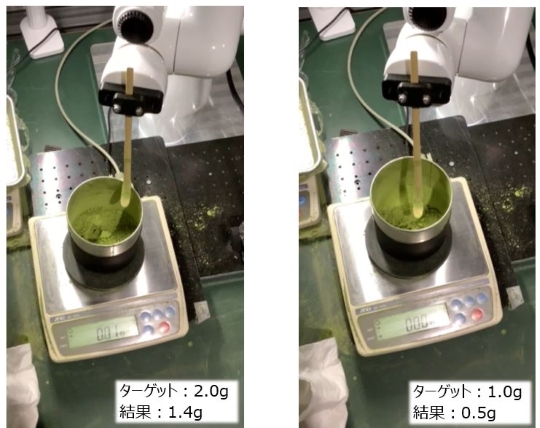
②指示した量の粉体を掬う

ポイント
掬うたびに粉体の山位置が変わるため
プログラミングが難しい動作をAIが判断して掬う
トレーニングデータ数:100回
学習時間:5時間
ひとつの推論モデルで様々な山の位置の粉体を狙って掬う
トレーニングデータ数:100回
学習時間:5時間
同一の推論モデルにてターゲット値を設定して掬う
上部の3Dカメラとロボット手元の2Dカメラを組み合わせワークをピッキングするアプリケーション
ポイント
ワークの位置が変わってもセンサー(カメラ)で場所を
特定して把持が可能
位置が変わるたびにプログラムを再設定する手順が不要
トレーニングデータ数:50回
学習時間:4時間
ロボット言語PacScriptで実装するプログラムの中に
「推論」を組込むことができます
上部の3Dカメラとロボット手元の2Dカメラを組み合わせコンセントにプラグを差し込むアプリケーション
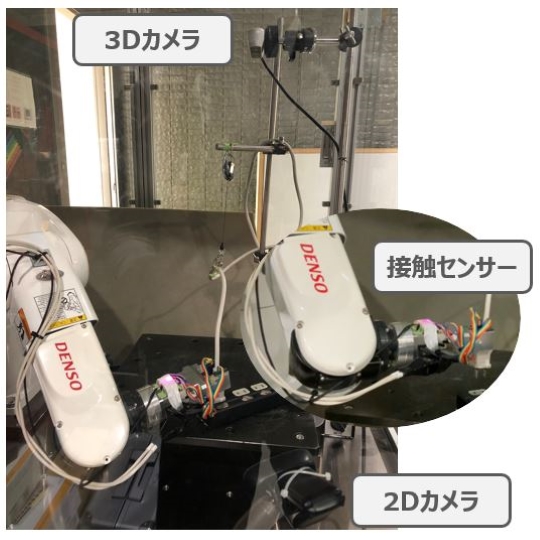
ポイント
プログラミングでは動作指示が難しい
把持位置や角度のズレに対応してプラグの差し込みが可能
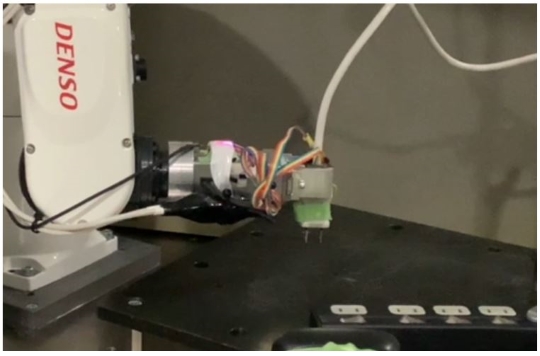
トレーニングデータ数:30回
学習時間:7時間
トレーニング方法:ミラー制御
プログラミングし難いコンセントにプラグを差し込む動作はミラー制御を活用