HSシリーズの特長を継承し、スピード・性能を向上した次期型スカラロボットです。
アーム長|350・450・550mm
Z軸|100・150・200・320mm
最大可搬質量|5kg
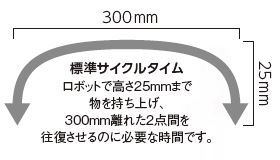
標準サイクルタイム|0.29秒
新型コントローラ(RC8A)採用で、モーターの性能を最大限に引き出し、標準サイクルタイムを0.29秒まで向上。
アームの状態を動的に制御に反映することによってロボットを短時間で制振させ、高速搬送時の振動や残留振動を抑制。
防塵防滴・クリーン・天吊りタイプ、UL仕様(1)を備え、様々な設置環境での自動化を実現します。

| 項目 | 仕様 | |||
|---|---|---|---|---|
| 本体型式(*2) | HS035A1-N/* | HS045A1-N/* | HS055A1-N/* | |
| 軸数 | 4 | |||
| 位置検出方式 | アブソリュートエンコーダ | |||
| 駆動モータ/ブレーキ | 全軸ACサーボモータ/Z軸、T軸 ブレーキ付 | |||
| アーム全長(第1アーム+第2アーム) | 350(125+225)mm | 450(225+225)mm | 550(325+225)mm | |
| 動作角度およびストローク | J1(第1軸) | ±155° | ||
| J2(第2軸) | ±145° | |||
| Z(第3軸) | *=10 :100mm, *=15 :150mm, *=20 :200mm, *=32 :320mm, | |||
| T(第4軸) | ±360° | |||
| 最大可搬質量 | 5kg | |||
| 合成最大速度 (ツール取付面中心) |
アーム先端 | 7,200mm/sec | 6,300mm/sec | 7,100mm/sec |
| Z | 2,000mm/sec | |||
| T | 2,400°/sec | |||
| 標準サイクルタイム(*3) | 0.29sec | |||
| 位置繰返し精度 (ツール取付面中心)(*4) |
J1+J2 | ±0.015mm | ±0.02mm | |
| Z | ±0.01mm | |||
| T | ±0.005° | |||
| 最大圧入力(下方向、1秒間以下) | 98N | |||
| 最大許容慣性モーメント(イナーシャ) | 0.1kg㎡ | |||
| ユーザ用エア配管 | 4系統(φ4×2, φ6×2) | |||
| ユーザ用信号線 | 19芯(近接センサ等の信号線) | |||
| エア源 | 常用圧力 | 0.05~0.35MPa | ||
| 許容最大圧力 | 0.59MPa | |||
| 空気伝播騒音(A加重等価持続音圧レベル) | 80dB以下 | |||
| 保護等級 | 防塵防滴タイプ : IP65(オプション) クリーンタイプ : ISOクラス3(オプション) | |||
| 質量 | 約25kg | |||
| 項目 | 仕様 | |||
|---|---|---|---|---|
| ロボット名 | HS035A1-N* | HS045A1-N* | HS055A1-N* | |
| アーム全長 | 125 (J1:第1アーム)+225 (J2:第2アーム)=350mm | 225 (J1:第1軸アーム)+225 (J2:第2軸アーム)=450mm | 325 (J1:第1軸アーム)+225 (J2:第2軸アーム)=550mm | |
| 動作角度 および ストローク | J1(第1軸) | ±155° | ||
| J2(第2軸) | ±145° | |||
| Z(第3軸)(*) | *=10:100mm *=15:150mm *=20:200mm *=32:320mm |
|||
| T(第4軸) | ±360° | |||
| 軸組合せ | J1 (第1軸)+J2 (第2軸)+Z (第3軸)+T (第4軸) | |||
| 最大可搬質量 | 5kg | |||
| 合成最大速度 | アーム先端 | 7,200mm/s | 6,300mm/s | 7,100mm/s |
| ZおよびT | Z (第3軸):2,000mm/s T (第4軸):2,400°/s |
|||
| 位置繰返し精度 (周囲温度一定) |
J1+J2 | ±0.015mm | ±0.02mm | |
| Z | ±0.01mm | |||
| T | ±0.005° | |||
| 最大圧入力(下方向) | 98N (1秒間以下) | |||
| 最大許容慣性モーメント | 0.1kgm2(可搬質量5kg時) | |||
| 位置検出方式 | アブソリュートエンコーダ | |||
| 駆動モータ、ブレーキ | 全軸ACサーボモータ Z軸、T軸:ブレーキ付 |
|||
| ブレーキ解除操作 | UL仕様以外 |
|
||
| UL仕様 |
|
|||
| ユーザ用エアー配管 | 4系統 (φ4×2、φ6×2) | |||
| ユーザ用信号線 | 19芯 (近接センサー等の信号線) | |||
| エアー源 | 常用圧力 | 0.05~0.35MPa | ||
| 許容最大圧力 | 0.59MPa | |||
| 防塵防滴仕様の保護等級 | IP65 | |||
| クリーン仕様のクリーン度 (14644-1) | クリーンタイプ:ISOクラス3 (Use Point) | |||
| 空気伝播騒音 (A加重等価持続音圧レベル) | 80dB以下 | |||
| 質量 | 約25kg (約55lb)(*1) | |||
| 項目 | 仕様 | ||
|---|---|---|---|
| ロボット名 | HS045A1-S* | HS055A1-S* | |
| アーム全長 | 225(J1:第1軸アーム)+225(J2:第2軸アーム)=450mm | 325 (J1:第1軸アーム)+225 (J2:第2軸アーム)=550mm | |
| 動作角度 および ストローク | J1(第1軸) | ±152° | ±155° |
| J2(第2軸) | ±141° | ±145° | |
| Z(第3軸)(*) | *=10:100mm *=15:150mm *=20:200mm *=32:320mm |
||
| T(第4軸) | ±360° | ||
| 軸組合わせ | J1 (第1軸)+J2 (第2軸)+Z (第3軸)+T (第4軸) | ||
| 最大可搬質量 | 5kg | ||
| 合成最大速度 | アーム先端 | 6,300mm/s | 7,100mm/s |
| ZおよびT | Z (第3軸):2,000mm/s T (第4軸):2,400°/s |
||
| 位置繰返し精度 (周囲温度一定) |
J1+J2 | ±0.02mm | |
| Z | ±0.01mm | ||
| T | ±0.005° | ||
| 最大圧入力 (下方向) | 98N (1秒間以下) | ||
| 最大許容慣性モーメント | 0.1kgm2 (可搬質量5kg時) | ||
| 位置検出方式 | アブソリュートエンコーダ | ||
| ブレーキ解除操作 | UL仕様以外 |
|
|
| 駆動モータ、ブレーキ | 全軸ACサーボモータ Z軸、T軸:ブレーキ付 |
||
| ユーザ用エアー配管 | 4系統 (φ4×2、φ6×2) | ||
| ユーザ用信号線 | 19芯 (近接センサー等の信号線) | ||
| エアー源 | 常用圧力 | 0.05~0.35MPa | |
| 許容最大圧力 | 0.59MPa | ||
| 防塵防滴仕様の保護等級 | IP65 | ||
| 空気伝播騒音 (A加重等価持続音圧レベル) | 80dB以下 | ||
| 質 量 | 約25kg (約55lb)(*2) | ||

単位:mm
| 型式 | A | B | C |
|---|---|---|---|
| HS035* | 350 | 125 | 143 |
| HS045* | 450 | 225 | 136 |
| HS055* | 550 | 325 | 191 |
単位:mm