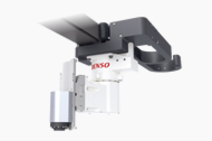
快速启动。快速持续运行。正确停止。
臂长|480・550・650mm
上下行程|100・200・320・510mm
最大可搬运质量|8kg
标准循环时间|0.28・0.31秒
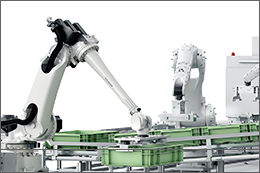
关于机器人的性能,往往仅通过样册样册参数无法完全搞懂。节拍内是否可以完成,真的可以持续作动吗,无法判的情形时有发生。为了解决这样的课题,把【高速开始作动】【高速持续运行】【精准停止作动】这些使用现场一直所追求的基本性能发挥到极致的,实现了真正【实物高速性】的就是新型高速SCARA机器人HSR系列产品。实现了产品高速性的飞跃之后,从传统的部件装配至食品・药品・化妆品等的包装工程,小型化省空间的高速拾取系统均得以成为现实,彻底革新了现状。

实现最高等级的高速运作。通过提高CPM(每分钟转数),可实现高速长时间运行。

实现长时间连续运转。
通过提高底座部位的散热性,实现了实际工序中要求的长时间连续运转。
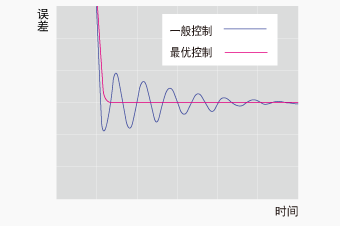
通过对机械臂状态的动态控制,可在短时间防止机器人振动。可抑制高速搬运时的振动及残留振动,缩短循环时间。
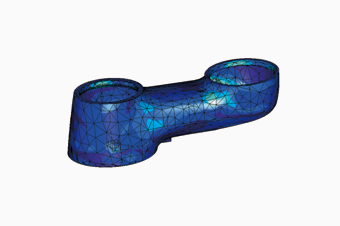
新设计,高刚性、轻量机械臂。
高刚性和轻量化兼顾,实现高可搬运质量(8kg)和高速运作。

通过轴反转、设置方向可转换。可选择地面安装、吊装。(※安装类型改变时,请洽询。)

将大容量电机与基本组件相统一,通过臂前端轻量化和臂构造最优化,提升其高速性。



| 项目 | 单位 | HSR048 | HSR055 | HSR065 | |
|---|---|---|---|---|---|
| 机械臂全长(第1臂 + 第2臂) | mm | 480 | 550 | 650 | |
| 第1臂 | mm | 205 | 275 | 375 | |
| 第2臂 | mm | 275 | 275 | 275 | |
| Z轴行程 | mm | 100/200/320 | |||
| 可搬运质量 | kg | 8 | |||
| 安装方法 | - | 地面安装型/悬挂安装型 | |||
| 重复定位精度(工具安装面中心(1)) | J1+J2 | mm | ±0.01 | ±0.012 | ±0.012 |
| Z | mm | ±0.01 | ±0.01 | ±0.01 | |
| T | deg | ±0.004 | ±0.004 | ±0.004 | |
| HSR048A1-N/S* | HSR055A1-N/S* | HSR065A1-N/S* | ||
|---|---|---|---|---|
| 机械臂全长 | 205 (J1:第1臂)+275 (J2:第2臂)=480mm | 275 (J1:第1臂)+275 (J2:第2臂)=550mm | 375 (J1:第1臂)+275 (J2:第2臂)=650mm | |
| 动作角度 及 行程 | J1 (第1轴) | ±130° | ||
| J2 (第2轴) | ±143.5° | ±150° | ||
| Z (第3轴)(*) | *=10:100mm *=20:200mm *=32:320mm *=51:510mm |
*=10:100mm *=20:200mm *=32:320mm *=51:510mm |
*=10:100mm *=20:200mm *=32:320mm *=51:510mm |
|
| T (第4轴) | ±360° | |||
| 轴组合 | J1 (第1轴)+J2 (第2轴)+Z (第3轴)+T (第4轴) | |||
| 最大可搬运质量 | 8kg | |||
| 合成最大速度 | 机械臂前端 | 7,540mm/s | 8,000mm/s | 8,850mm/s |
| Z和T | Z (第3轴): 100mm:1,700mm/s 200mm:2,300mm/s 320mm:2,475mm/s T (第4轴):2,500°/s |
Z (第3轴): 100mm:1,700mm/s 200mm:2,300mm/s 320mm:2,475mm/s T (第4轴):2,500°/s |
Z (第3轴): 100mm:1,700mm/s 200mm:2,300mm/s 320mm:2.475mm/s T(第4轴):2,500°/s |
|
| 重复定位精度(环境温度恒定) | J1+J2 | ±0.01mm | ±0.012mm | |
| Z | ±0.01mm | |||
| T | ±0.004° | |||
| 最大压力输入(向下) | 98N (1秒以下) | |||
| 最大容许惯性力矩 | 0.12kgm2 | |||
| 位置检测方式 | 绝对编码器 | |||
| 驱动电机、制动器 | 带全轴AC伺服电机 Z轴、T轴:带制动器 | |||
| 制动器解除操作 | UL规格以外 |
|
||
| UL规格 |
|
|||
| 用户用气动配管 | 4系统 (φ4×2、φ6×2) | |||
| 用户用信号线 | ・19芯(近接传感器等的信号线) ・Ethernet(8)(1) |
|||
| 空气源 | 常用压力 | 0.05~0.35MPa | ||
| 最大容许压力 | 0.59MPa | |||
| 空气传播噪音(A加权等效连续声压级) | 80dB以下 | |||
| 质量(2) | 约31 kg (约68.4 lb) | 约31.5 kg (约69.5 lb) | 约32 kg (约70.6 lb) | |
| HSR048A1-N/S* | HSR055A1-N/S* | HSR065A1-N/S* | ||
|---|---|---|---|---|
| 机械臂全长 | 205 (J1:第1臂)+275 (J2:第2臂)=480mm | 275 (J1:第1臂) +275 (J2:第2臂) =550mm | 375 (J1:第1臂) +275 (J2:第2臂) =650mm | |
| 动作角度 及 行程 | J1 (第1轴) | ±130° | ||
| J2 (第2轴) | ±143.5° | ±150° | ||
| Z (第3轴)(*) | *=17:170mm *=29:290mm *=45:450mm |
*=17:170mm *=29:290mm *=45:450mm |
*=17:170mm *=29:290mm *=45:450mm |
|
| T (第4轴) | ±360° | |||
| 轴组合 | J1 (第1轴)+J2 (第2轴)+Z (第3轴)+T (第4轴) | |||
| 最大可搬运质量 | 8kg | |||
| 合成最大速度 | 机械臂前端 | 7,540mm/s | 8,000mm/s | 8,850mm/s |
| Z和T | Z (第3轴): 170mm:2,250mm/s 290mm:2,475mm/s T (第4轴):2,500°/s |
Z (第3轴): 170mm:2,250mm/s 290mm:2,475mm/s T (第4轴):2,500°/s |
Z (第3轴): 170mm:2,250mm/s 290mm:2,475mm/s T (第4轴):2,500°/s |
|
| 重复定位精度(环境温度恒定) | J1+J2 | ±0.01mm | ±0.012mm | |
| Z | ±0.01mm | |||
| T | ±0.004° | |||
| 最大压力输入(向下) | 98N (1秒以下) | |||
| 最大容许惯性力矩 | 0.12kgm2 | |||
| 位置检测方式 | 绝对编码器 | |||
| 驱动电机、制动器 | 带全轴AC伺服电机 Z軸、T軸:带制动器 | |||
| 制动器解除操作 | UL规格以外 |
|
||
| UL规格 |
|
|||
| 用户用气动配管 | 4系统 (φ4×2、φ6×2) | |||
| 用户用信号线 | ・19芯(近接传感器等的信号线) ・Ethernet(8)(1) |
|||
| 空气源 | 常用压力 | 0.05~0.35MPa | ||
| 最大容许压力 | 0.59MPa | |||
| 空气传播噪音(A加权等效连续声压级) | 80dB以下 | |||
| 质量(2) | 约31 kg (约68.4 lb) | 约31.5 kg (约69.5 lb) | 约32 kg (约70.6 lb) | |


为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)