



Booth

Venue Map DENSO WAVE Booth: East Exhibition Halls E7-11




Factory
Factory Innovation
为实现下一代工厂,我们展示了利用高速人机协作机器人 COBOTTA PRO、AI视觉 和 数字孪生 的自动化与效率提升技术。现场还提供由AI驱动的最优动作路径自动生成体验演示。
-

移动机械手实现的卷轴更换装置
通过结合COBOTTA PRO与AMR的移动机械臂,实现原本由人工操作的贴片机卷轴更换作业自动化。凭借QR码位置校正与减震功能,可实现无需重新示教的坐标修正及周期时间缩短。
-

COBOTTA PRO 高速·高精度控制演示
COBOTTA PRO在各轴配备高刚性高精度扭矩传感器。其卓越的加减速性能可在不影响控制性能的前提下实现高精度作业。同时,通过触觉感应软护罩在提升安全性的同时提高协作运行速度,从而提升生产效率。敬请亲身体验这款协作机器人中顶尖的高速高精度动作性能。
-

COBOTTA PRO 活用内置力传感器实现高难度作业
COBOTTA PRO的第二机械臂内置力传感器,可实时检测细微的力变化。它能助力实现零件装配、研磨、检测等高难度作业的自动化。本次展览中,您将看到利用内置力传感器实现的高精度作业演示。
-
工厂内物流案例 使用COBOTTA PRO进行看板插入/取出及周转箱搬运
通过COBOTTA PRO与自主研发的物流机械手,无需更换工具即可实现看板插入/取出及周转箱搬运。该方案助力实现工厂内部物流自动化,有效提升生产效率。
-
基于数字孪生的设备制造变革
通过运用将现场设备与虚拟空间同步的数字孪生技术,实现设备状态与运行过程的可视化,并借助远程操控实现灵活的开发与运营。我们将通过设备制造领域的变革,为您介绍电装为实现下一代工厂而打造的最尖端生产系统。
-

基于实时同步控制的密封材料涂布
采用支持EtherCAT从站的RC8控制器,以1毫秒周期同步控制位移传感器、点胶机与机器人。在追随工件形状和机器人速度的同时,实现高速、高精度的密封材料涂布。
-

基于Cambrian视觉系统的透明工件高速输送带追踪技术
通过结合搭载AI的Cambrian视觉系统的物体识别技术与HSR关节式机器人的高速动作,实现了对透明工件的高速传送带追踪。
-

寒武纪视觉系统与多台机器人协同完成线束组装
通过搭载AI的Cambrian视觉系统与两台机器人的协同作业,实现了传统3D视觉难以完成的线束(软体物)组装作业自动化。
-
基于AI基础模型与交互式学习的机器人直观控制
通过仅需人类示范即可让机器人学习动作的“单次学习”技术,实现了直观的教学操作。无需传统复杂的编程和定位工作,有效减轻了数据采集与学习过程的负担。
-
VMB系列实现散热器的高速搬运 / 采用Mech-Eye进行散装拣选与异品检测
采用高速高刚性的VMB系列实现散热器的高速搬运。VMB系列凭借全覆盖结构与完善的机内布线,可在恶劣环境中顺利部署。通过AI视觉系统Mech-Eye,实现散热器粗放放置状态下的识别与异品检测。运用深度学习技术提升识别精度,确保稳定运行。
-
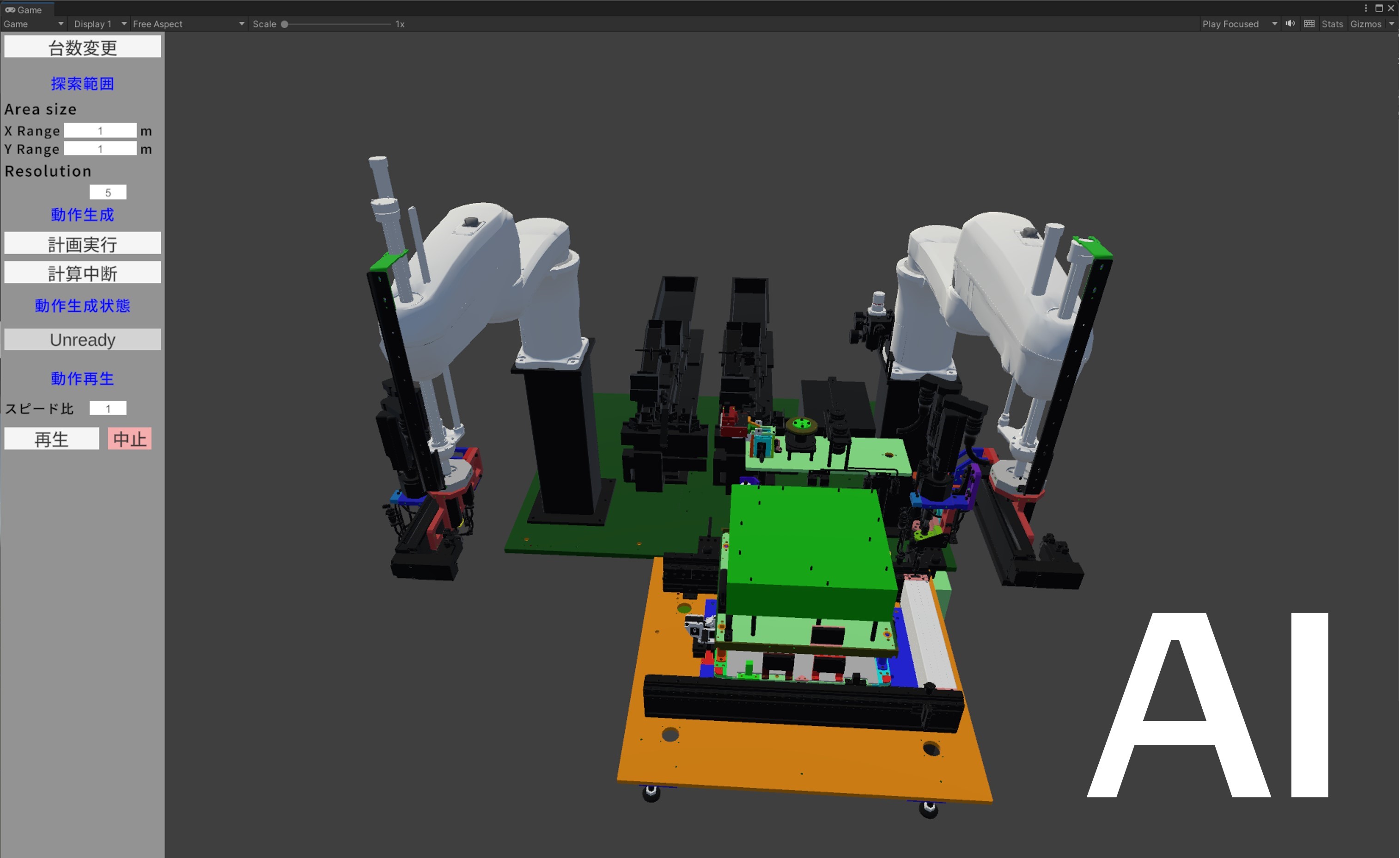
电装自主研发的AI算法实现机器人最优路径与最优布局生成
电装独创的AI算法可自动探索机器人的最佳配置方案,并在避开障碍物的同时自动生成实现最短循环周期的路径。这消除了以往反复试错的调整过程,使设备能在短时间内实现高效生产。
-

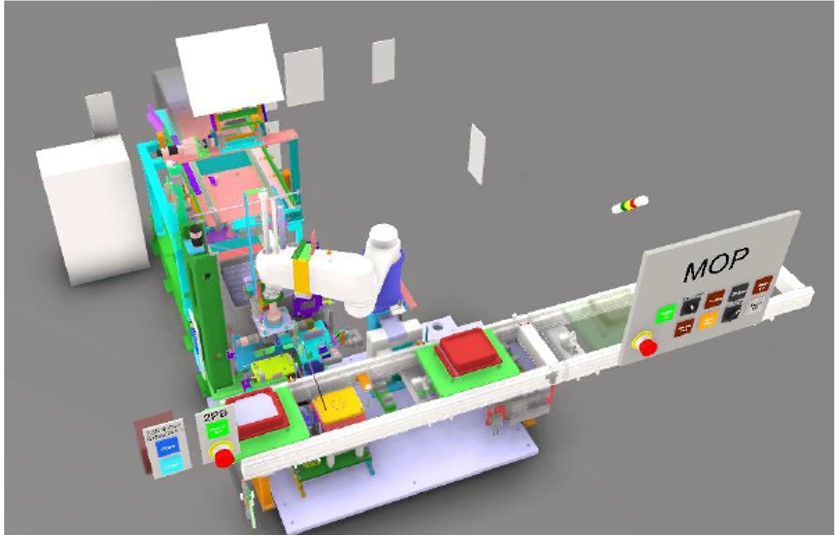
基于游戏引擎「Unity」的数字孪生设备集成解决方案
通过Unity与电装机器人的联动,可在虚拟空间中完整复现包含机器人及PLC在内的整套设备运行。借助虚拟环境进行与实机相同的运行验证与调试,大幅减少现场调试工作,助力提升设备启动效率。本次展示将实现无需实拍即可生成Mech-Eye的AI模型,有效降低3D摄像机部署的复杂性。
-
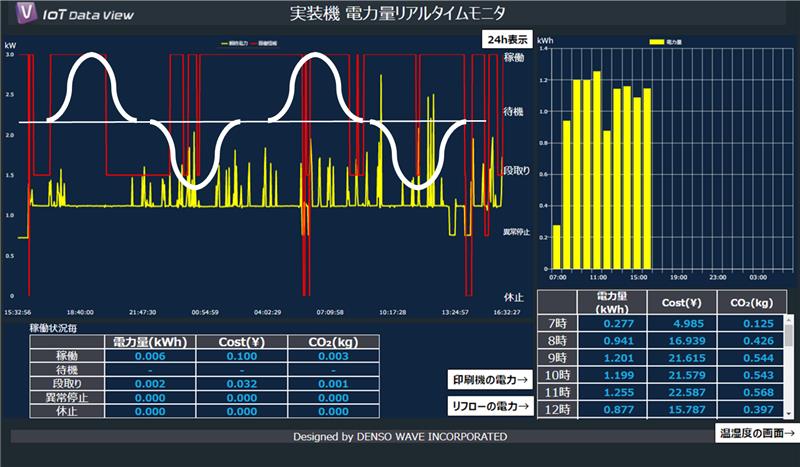
助力生产设备能源监控与预测性维护的物联网解决方案
通过活用生产设备能源KAIZEN套件,可轻松收集设备能源信息,并借助基于收集数据的机器人动作优化功能,为节能活动提供支持。同时,我们还将介绍一款物联网解决方案,通过收集并可视化机器人运行信息,助力精准把握维护时机。

Society
Robotics for Society
我们展示利用制造技术应对社会课题的机器人解决方案。欢迎了解我们在实验室自动化和农业领域的最新举措,包括番茄采摘机器人等应用。

-
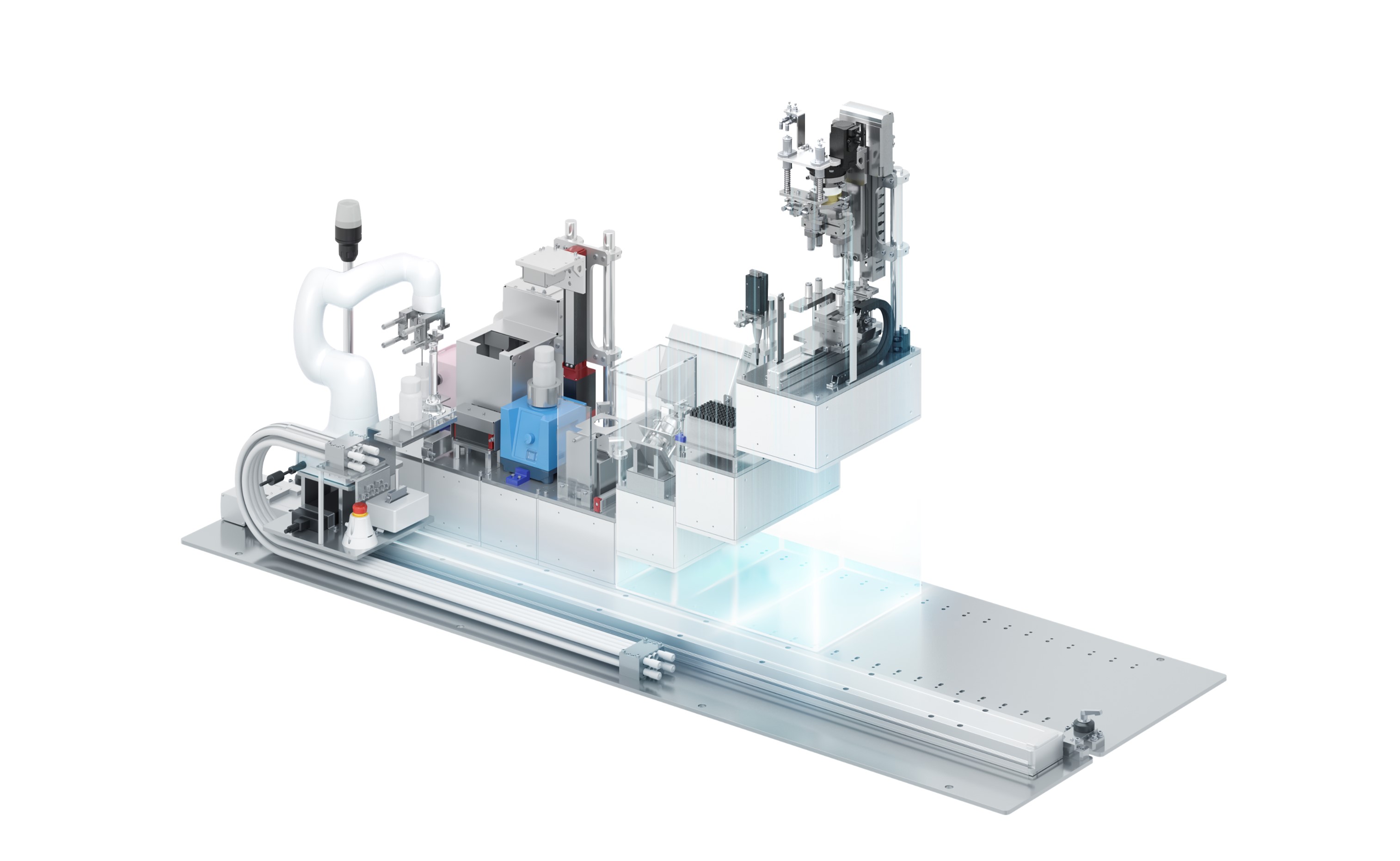
模块化实验室自动化 COBOTTA LAB Modules
COBOTTA与自主研发的标准化模块相结合,形成了一套灵活且可扩展性强的系统。模块的组合与布局可自由设定,通过滑动移动的机器人实现对多个模块的协同控制。
-
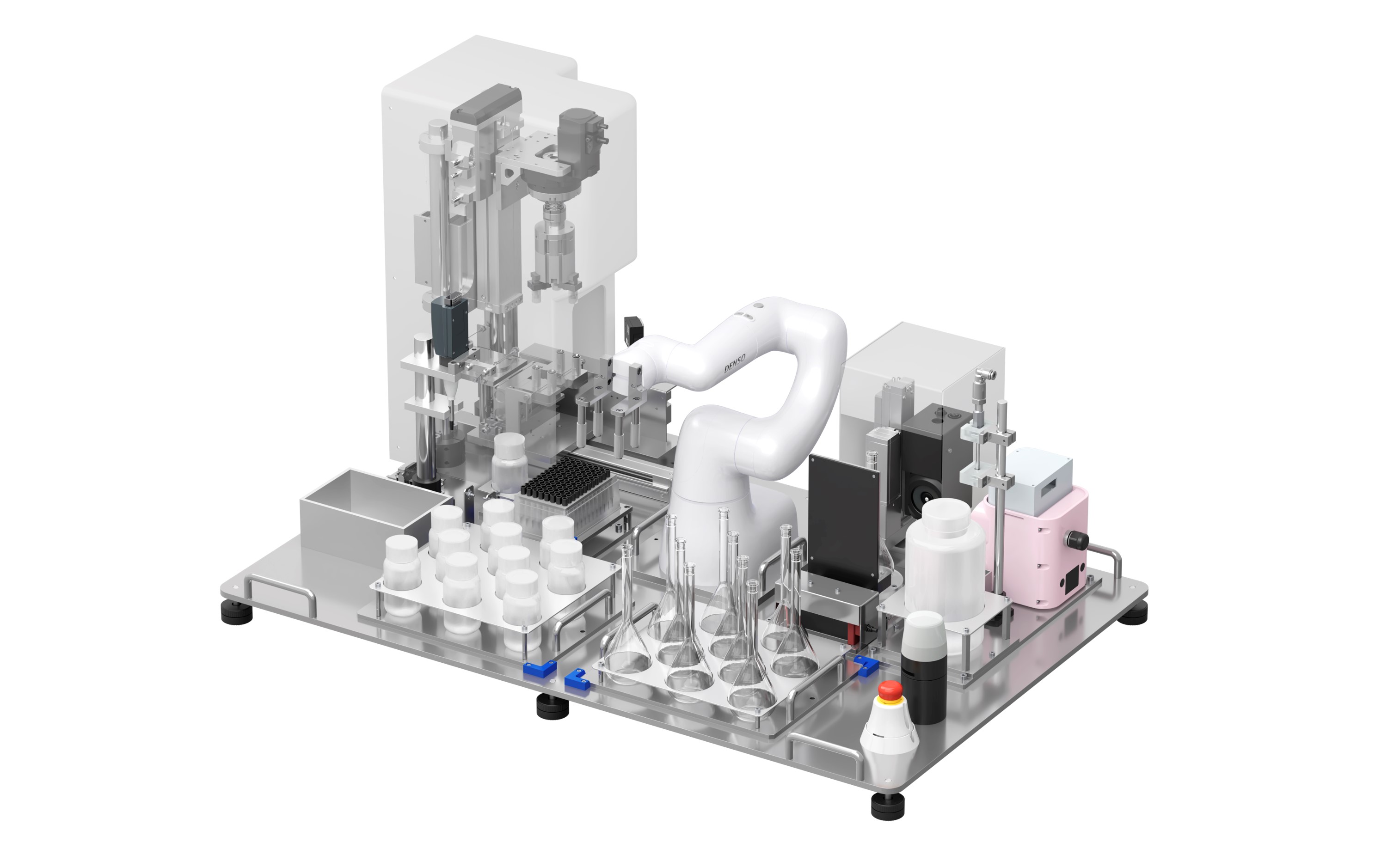
实验室自动化-标准系统-
定容系统这是款可选择所需规格、导入后即刻发挥作用的即战力自动化系统。它能实现多种液体的分注、通过识别刻线进行定量、以及液体倾倒混合等定容作业的自动化。
-

无菌制药灌装与加工解决方案,用于处理细胞培养基
该系统是搭载医药医疗机器人VS050-S2的药品无菌灌装系统。在满足电子记录等监管要求的前提下,操作员能够安全高效地执行高精度、高精度的灌装作业。
-

房式迷你番茄全自动采收机器人 Artemy®(阿特米)
电装FVC(食品价值链)事业推进部的举措。针对农业人口不足与粮食危机等社会课题,通过“农业工厂化”实现食品稳定生产。利用搭载传感器的机器人及摄像头,自动完成采收作业。
访问
展会地点:东京国际展览中心
地址:〒135-0063 东京都江东区有明 3-11-1
电话:03-5530-1111