LESSON 2簡単なプログラムでロボットを動かす
ロボットを自動運転で動かす 10
ロボットの停止操作
4つの停止方法
ロボット停止操作には、次に紹介する4つの操作があります。
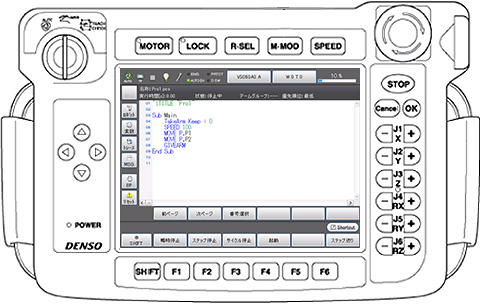

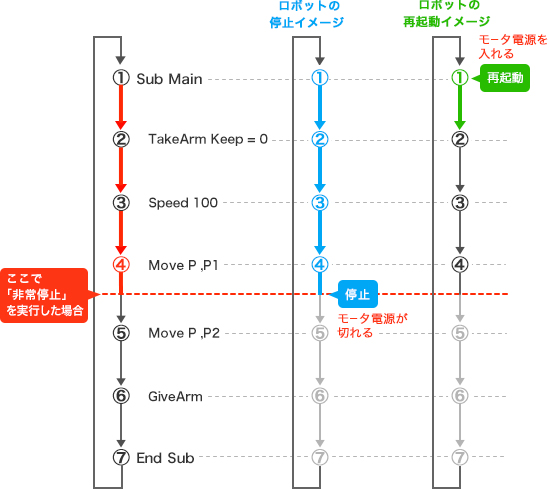
● 非常停止 : 非常停止ボタン
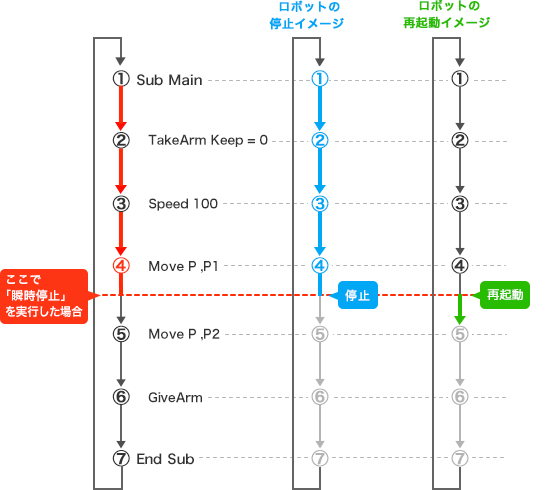
● 瞬時停止 :[F1]
● ステップ停止 :[F2]
● サイクル停止 :[F3]
次へ

非常停止ボタンを押すと、ロボットは非常停止します。
ロボットを緊急停止させたい時に使用します。
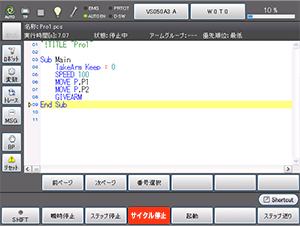
プログラム一覧画面の[状態]欄の表示が
「停止中」になります。
この場合、モータ電源は切れます。
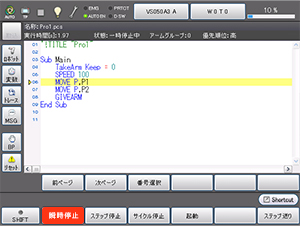
瞬時停止を実行すると、直ちに停止します。
プログラム一覧画面の[状態]欄の表示が
「一時停止中」になります。
また、モータ電源は切れません。
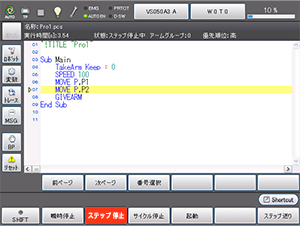
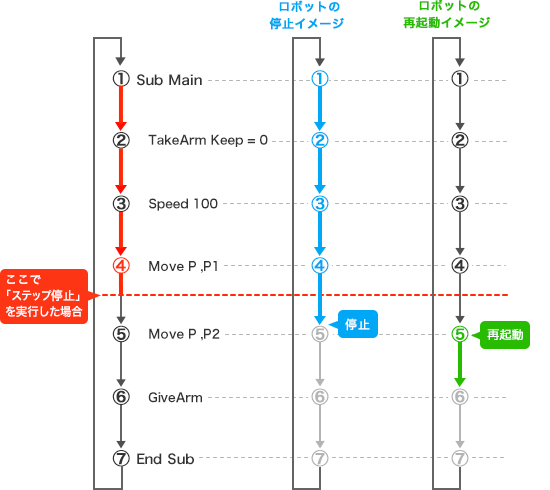
ステップ停止を実行すると、実行中の行の処理完了後に停止します。
プログラム一覧画面の[状態]欄の表示が
「ステップ停止中」になります。
また、モータ電源は切れません。
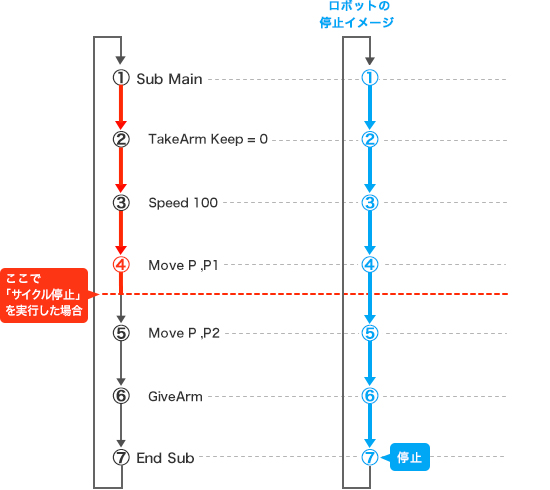
サイクル停止を実行すると、実行中のプログラムの処理完了後に停止します。
ロボットを連続起動で動かした場合に
使用します。
プログラム一覧画面の[状態]欄の表示が
「停止中」になります。
また、モータ電源は切れません。



4つの停止方法
ロボット停止操作には、次に紹介する4つの操作があります。



