はじめに
ティーチング方法 1
ティーチング方法 2
ティーチング方法 3
ティーチング方法 4
ティーチング方法 5
ティーチング方法 6
ティーチング方法 7
ティーチング方法 8
ティーチング方法 9
LESSON 2
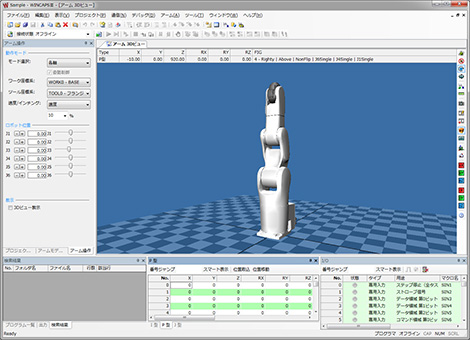
簡単なプログラムでロボットを動かす
ティーチングを行う 4
グローバル変数へのティーチング方法
手順3
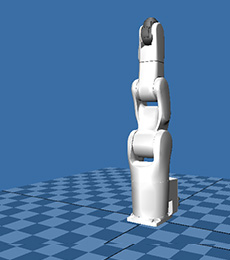
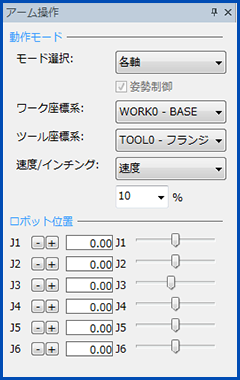
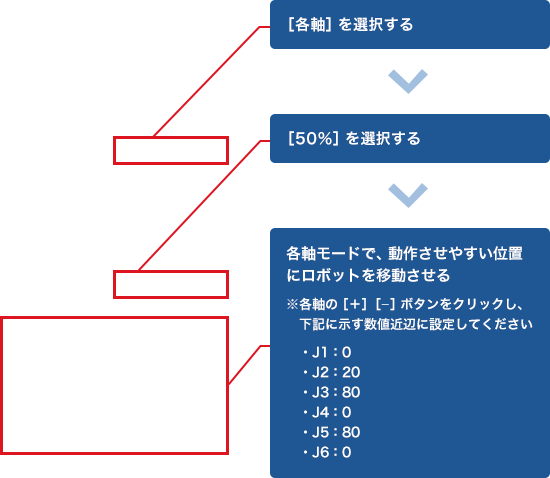
アーム操作でロボットを動かす ①基本姿勢
画面上のロボットが基本姿勢となります。
次へ