LESSON 2簡単なプログラムでロボットを動かす
ティーチングを行う 2
グローバル変数へのティーチング方法
手順1アーム3Dビューを開く
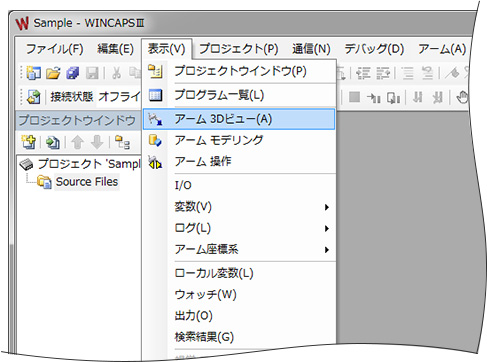
![メニューの[表示(V)]から[アーム3Dビュー(A)]を選択する](img/teaching2/on_01.png)
アーム3Dビュー
「アーム3Dビュー」は、ロボットの現在の
姿勢を「3D画像」で表示します。
実際のロボットを動かさなくても、WINCAPSⅢでロボットの動きを確認することができ、効率良く安全にプログラムの開発を行うことができます。
次へ



手順1アーム3Dビューを開く
「アーム3Dビュー」は、ロボットの現在の
姿勢を「3D画像」で表示します。
実際のロボットを動かさなくても、WINCAPSⅢでロボットの動きを確認することができ、効率良く安全にプログラムの開発を行うことができます。
次へ



