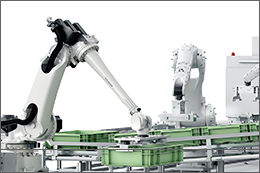
适用于大型物品的搬运作业和码垛作业等,可减轻处理重物的作业人员负担。
※联系我们以获取有关机器人的更多信息。
最大动作领域|1506・1804mm
最大可搬运质量|25kg

通过完善用户配线、管道、电磁阀,增添EtherCAT的机体内配线,可将各种传感器、设备安装在机器人手臂上。降低机器人复杂的外部配线/配管的繁复性。

除了标准规格外,还拥有符合防尘防滴性( IP67)、洁净度(ISO等级5)的产品阵容,可应用于要求严格的卫生洁净度的电气电子部件、食品制造和医药品/医疗器械制造工序的自动化等。

可在机器人外部安装编码器备用电池。便于更换电池,提高维护性。

解除各轴制动器的开关。(此开关的配线直接连接至各轴的制动器解除信号。)

可水平调节
不可水平调节

| 项 目 | 单 位 | 规 格 | ||||
|---|---|---|---|---|---|---|
| 产品名称 | - | VMB-2515 | VMB-2518 | |||
| 轴数 | - | 6 | ||||
| 驱动电机/制动 | - | 全轴AC伺服电机/带全轴制动 | ||||
| 机械臂全长(第1机械臂+第2机械臂) | mm | 1,395(710+685) | 1,695(860+835) | |||
| 最大动作区域 | mm | 1,506 (P点 : 轴4、轴5、轴6中心) | 1,804 (P点 : 轴4、轴5、轴6中心) | |||
| 动作角度 | 轴1 | ° | -170 ~ 170*¹ | |||
| 轴2 | ° | -100 ~ 140 | ||||
| 轴3 | ° | -130 ~ 170 | ||||
| 轴4 | ° | -200 ~ 200 | ||||
| 轴5 | ° | -145 ~ 145 | ||||
| 轴6 | ° | -360 ~ 360 | ||||
| 最大可搬运重量 | kg | 25 | ||||
| 重复定位精度(工具安装面中心)*² | mm | X、Y、Z各方向:±0.05 | ||||
| 最大容许惯量 | 轴4周围 | N・m | 52 | |||
| 轴5周围 | N・m | 52 | ||||
| 轴6周围 | N・m | 52 | ||||
| 空气配管 | 第二臂 | 无选购配件 | - | 2个系统(Φ8×2) | ||
| 有选购配件 | - | 1个系统(φ8 ×1) 电磁阀专用8个系统(φ6×8) [电磁阀a、b、c组合选择式] a.2个位置,双螺线管 b.3个位置,中位泄气 c.3个位置,中位封闭 |
||||
| 3轴部 | 无选购配件 | - | 0个系统 | |||
| 有选购配件 | - | 1个系统(φ8 ×1) | ||||
| 信号线、Ethernet | 第二臂 | 无选购配件 | - | 信号线:15芯 Ethernet电缆:1个 |
||
| 有选购配件 | - | 信号线:15芯+10芯*³ Ethernet电缆:1个+1个 |
||||
| 3轴部 | 无选购配件 | - | 0芯 | |||
| 有选购配件 | - | 10芯 | ||||
| 空气源 | 常用压力 | MPa | 0.20~0.39 | |||
| 最大容许压力 | MPa | 0.49 | ||||
| 噪音(等效声级[A特性]) | dB | 75 | ||||
| 防护等级 | - | 标准型:IP40 耐恶劣环境型:IP67 |
||||
| 洁净度(ISO 14644-1) | - | Class 5(洁净型) | ||||
| 污损度*⁴ | - | 标准型: 2*⁵ 耐恶劣环境型: 3 洁净型: 2 |
||||
| 主体质量 | kg | 約230 | 約250 | |||





为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)