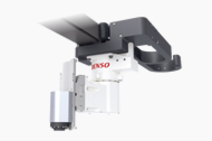
用于大型物品的搬运作业和码垛作业等,可减轻处理重物的作业人员负担。
※联系我们以获取有关机器人的更多信息。
最大动作领域|2503 / 2257mm
最大可搬运质量|40 / 60 kg

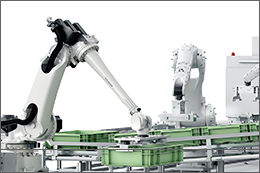
除了搬运、检查等自动化工序外,还能用于码垛和包装中的工序,将人力从处理重物的作业中解放了出来,加速了工厂内物流的自动化。

符合保护等级IP67*,有助于在油雾飞散的严酷环境下实现自动化。
*符合手腕IP67、本体IP65

与离线编程软件WINCAPS产品的“码垛生成器”相组合,以非编码方式自动执行码垛作业。

机内进行了现场网络配线,可降低外围配线的繁复性。
支持通信标准:PROFINET/PROFIBUS/DeviceNet
机内进行了DeviceNet等现场网络的配线,降低了外围配线的繁复性。
不可水平调节
不可水平调节

| 项 目 | 单 位 | 规 格 | ||||
|---|---|---|---|---|---|---|
| 产品名称 | - | VLA-4025 | VLA-6022 | |||
| 轴数 | - | 6 | ||||
| 位置检测方式 | - | 绝对式编码器 | ||||
| 驱动电机/制动 | - | 全轴AC伺服电机/带全轴制动 | ||||
| 全臂长(第1臂+第2臂) | mm | 2085.5(860+1225.5) | 1835.5(860+975.5) | |||
| 最大动作区域 | mm | 2503(P点 : 轴4、轴5、轴6中心) | 2257(P点 : 轴4、轴5、轴6中心) | |||
| 动作角度 | 轴1 | ° | -180 ~ 180*¹ | |||
| 轴2 | ° | -60 ~ 125 | ||||
| 轴3 | ° | -160 ~ 0 | ||||
| 轴4 | ° | -2700 ~ 2700*⁴ | ||||
| 轴5 | ° | -123 ~ 123 | ||||
| 轴6 | ° | -2700 ~ 2700*⁴ | ||||
| 最大可搬运质量 | kg | 40 | 60 | |||
| 重复定位精度(工具安装面中心) *² | - | X, Y, Z各方向:±0.06 | ||||
| 最大容许惯量 | 轴4周围 | N・m | 167 | 221 | ||
| 轴5周围 | N・m | 167 | 221 | |||
| 轴6周围 | N・m | 98 | 118 | |||
| 空气配管 | - | 1个系统(内径Φ12.5) | ||||
| 信号线 | - | 14芯(19芯连接器) | ||||
| - | 15芯(17芯连接器)*³ | |||||
| 空气源 | 最大容许压力 | MPa | 2.0 | |||
| 噪音(等效声级[A特性]) | dB | 75 | ||||
| 保护等级 | - | 本体:IP65 / 手腕:IP67 | ||||
| 主机重量 | kg | 约655 | 约645 | |||
为会员提供技术信息检索服务和相关软件及电子手册的下载服务.(只限英文)