はじめに
ティーチング方法 1
ティーチング方法 2
ティーチング方法 3
ティーチング方法 4
ティーチング方法 5
LESSON 2
簡単なプログラムでロボットを動かす
ティーチングを行う 6
グローバル変数へのティーチング方法
手順2
登録したい位置を[変数名 P1]に保存する ②ロボット現在位置の取り込み
変数画面
[変数名 P1]が選択されていることを確認



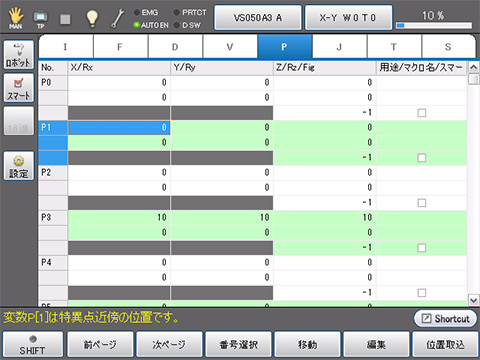


![[変数名 P1]の欄を選択する](img/teaching2/on_10.png)