手順2登録したい位置を[変数名 P1]に保存する ②ロボット現在位置の取り込み
変数画面
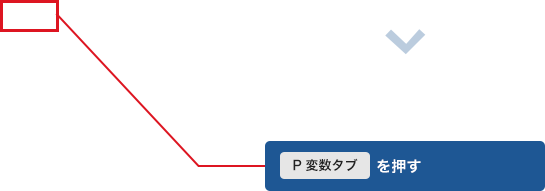
変数画面で変数タイプを選択します。 ここでは、P変数に位置を保存するので、画面内の[P 変数タブ]を押します。
変数画面が開いた際、画面の右側にロボットのアーム情報が表示されている場合は、[ロボット]ボタンを押すことによりアーム情報画面を消すことができます。