TPによる手動操作 1
TPによる手動操作 2
TPによる手動操作 3
TPによる手動操作 4
TPによる手動操作 5
TPによる手動操作 6
TPによる手動操作 7
LESSON 1
手動モードでロボットを動かす
ティーチングペンダントによる手動操作 14
7. 動作モードを選択し、手動運転する
手順3
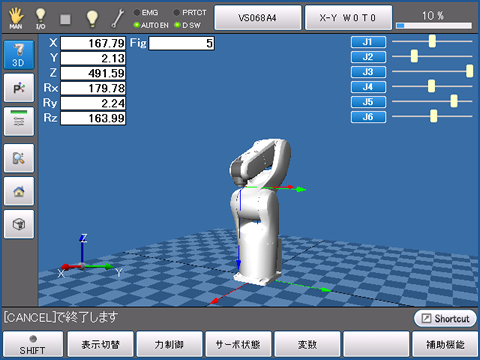
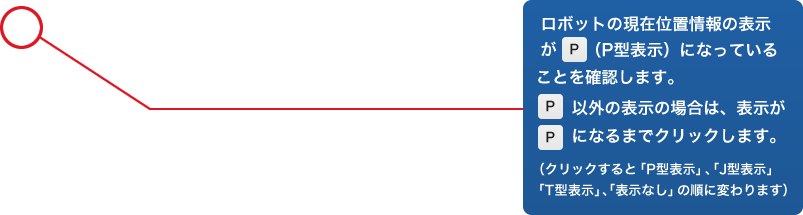
画面表示確認
ステータスバーにX-Yと表示されます。
次へ