TPによる手動操作 1
TPによる手動操作 2
TPによる手動操作 3
TPによる手動操作 4
TPによる手動操作 5
TPによる手動操作 6
TPによる手動操作 7
LESSON 1
手動モードでロボットを動かす
ティーチングペンダントによる手動操作 8
6. 手動操作でロボットの各アームを動作させる
手順1
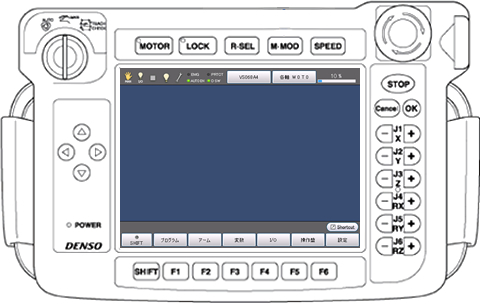
ティーチングペンダントのモニタにロボットを表示
この操作を行うとロボットが動作します。
作業者はロボットの動作範囲から出てください。