LESSON 1手動モードでロボットを動かす
ティーチングペンダントによる手動操作 11
7. 動作モードを選択し、手動運転する
手動モード は下記の3つの動作モードから選べます。
各モードを
-
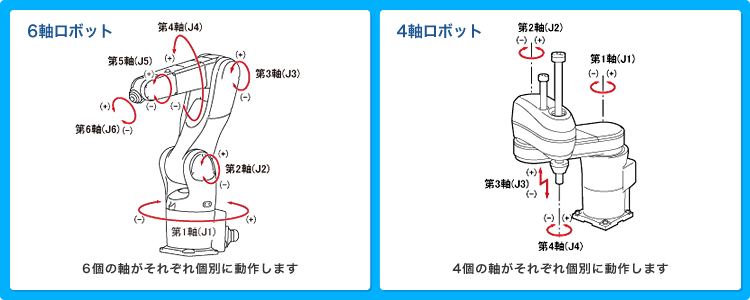
第1軸~第6軸(4軸ロボットの場合第4軸まで)をそれぞれ個別に動作させるモードです。
-
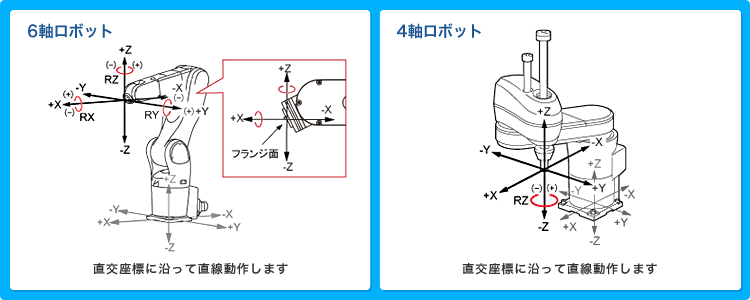
直交座標に沿って、ロボットフランジ面を直線動作させるモードです。
-
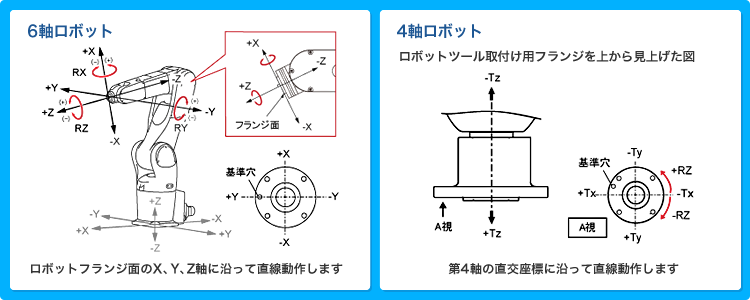
ロボットフランジ面のX、Y、Z軸に沿って、直線動作させるモードです。
次へ



手動モード は下記の3つの動作モードから選べます。
各モードを



第1軸~第6軸(4軸ロボットの場合第4軸まで)をそれぞれ個別に動作させるモードです。
直交座標に沿って、ロボットフランジ面を直線動作させるモードです。
ロボットフランジ面のX、Y、Z軸に沿って、直線動作させるモードです。



