


LESSON 1手動モードでロボットを動かす
ティーチングペンダント操作の基本 2
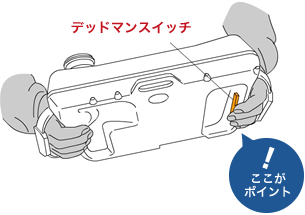
ティーチングペンダントの持ち方とデッドマンスイッチ
デッドマンスイッチの機能は、ティーチングペンダントを使って手動でロボットを運転している最中に予期しない
心神喪失、死亡などによって正常な運転ができなくなった場合、自動的かつ安全にロボットを停止させることです。
操作者がこのような状態に陥ったとき、このスイッチを押す力は、非常に弱くなるか、あるいは強くなるかのいずれかです。
デッドマンスイッチは、つぎの3つの操作状態を認識できるように設計された3ポジションスイッチです。
- 押していないか、押す力が弱いときスイッチOFF
- 押す力が正常なときスイッチON
- 押す力が強すぎるときスイッチOFF
スイッチがONのとき以外は、ロボットは停止し、ロボットを運転させることはできません。
安全性を確保するために、たとえば手動モード時に移動方向キーを押してロボットを動かすためには、
デッドマンスイッチを同時に押下していなければならないように設計されています。
次へ



