


LESSON 3プログラムの演習
プログラム演習 2
解答
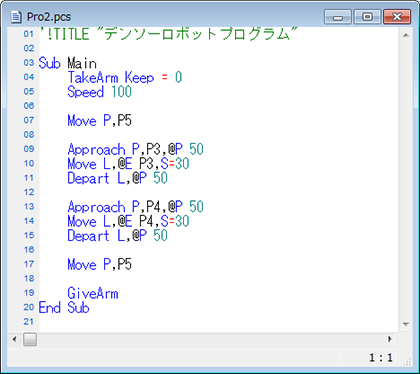
- '!TITLE "デンソーロボットプログラム"
- Sub Main
- TakeArm Keep=0
- Speed 100
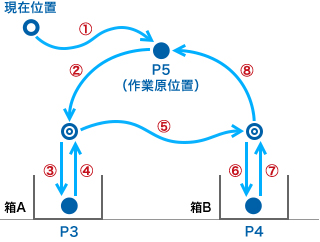
- Move P,P5
- Approach P,P3,@P 50
- Move L,@E P3,S=30
- Depart L,@P 50
- Approach P,P4,@P 50
- Move L,@E P4,S=30
- Depart L,@P 50
- Move P,P5
- GiveArm
- End Sub
- '作業原位置移動
- 'P3上点に移動
- 'P3点へ下降
- '上昇
- 'P4上点に移動
- 'P4点へ下降
- '上昇
- '作業原位置移動

Approach 、Departを使用することで、
、Departを使用することで、
ティーチング作業や位置変更時の修正作業が
低減でき、作業効率が良くなります。
● 実際の画面
次へ



