


LESSON 3プログラムの演習
プログラム演習 1
演習
演習WINCAPSⅢで以下の仕様でのティーチング・プログラミング・動作確認を行ってみましょう。
動作仕様
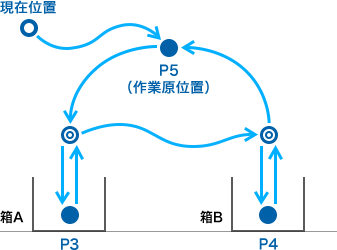
- アプローチポイントとデパートポイントはパス動作(@P)
- アプローチ長、デパート長は50mmで動作
- 上昇・下降は直線補間(L)、他はPTP(P)動作
- P3、P4への下降時のスピードは30%(S=30)
- P3、P4のポイントはエンコーダ値確認動作(@E)
●:教示ポイント
上記の動作仕様に従って以下の空欄にコマンドを入れて下さい。
- '!TITLE "デンソーロボットプログラム"
- Sub Main
- TakeArm Keep=0
- Speed 100
- GiveArm
- End Sub
- '作業原位置移動
- 'P3上点に移動
- 'P3点へ下降
- '上昇
- 'P4上点に移動
- 'P4点へ下降
- '上昇
- '作業原位置移動

まず、8つの動作をMove、Approach、
Departのいずれかの命令で埋めてみましょう。
その後、補間方法以降を記述し、コマンドを
入力、ティーチング・ティーチチェック・自動
運転の一連の作業を行います。
次へ



