
補間方法
〈補間方法〉には、P、L、Cのいずれかを指定します。
-
P:PTP(Point to Point)制御動作
現在位置から次ポイントへ動作する場合、
途中の経路は、ロボット任せです。
-
L:CP(Continuous Path)制御動作…直線補間
現在位置と次ポイントを、ハンドの姿勢や速度を
一定に保ちながら直線に動作します。
-
C:CP(Continuous Path)制御動作…円弧補間
3つのポイントを結ぶ円弧上をロボット先端が
動作します。
〈補間方法〉には、P、L、Cのいずれかを指定します。
P:PTP(Point to Point)制御動作
現在位置から次ポイントへ動作する場合、
途中の経路は、ロボット任せです。
L:CP(Continuous Path)制御動作…直線補間
現在位置と次ポイントを、ハンドの姿勢や速度を
一定に保ちながら直線に動作します。
C:CP(Continuous Path)制御動作…円弧補間
3つのポイントを結ぶ円弧上をロボット先端が
動作します。
〈パス開始変位〉の値は、指定座標(ポーズ)を中心とした球の半径で、動作指令値がその中に入ると次の制御へ移ります。
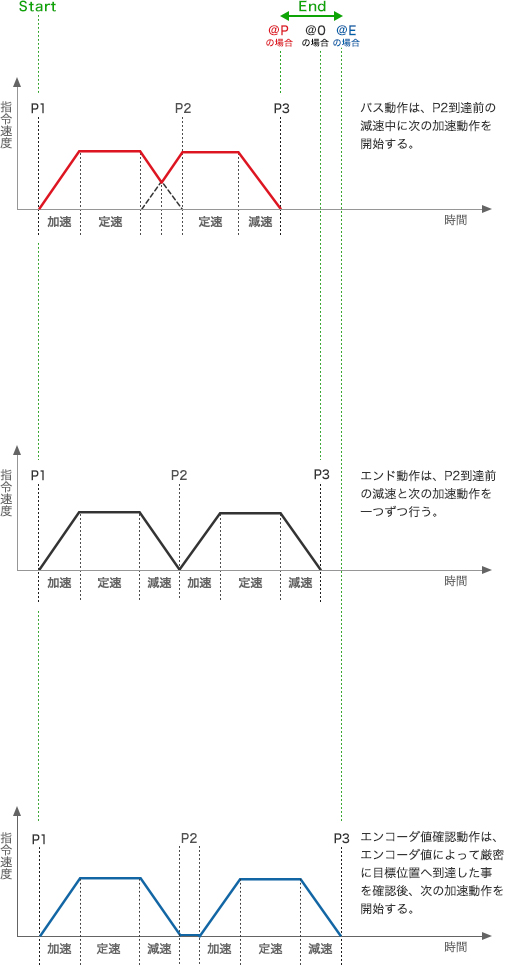
パス開始変位には、パス動作、エンド動作、エンコーダ値確認動作があり、これら3種類の動作の実行時間は、
もっとも早いのが「パス動作」、次に「エンド動作」、もっとも時間がかかるのが「エンコーダ値確認動作」になります。
ティーチングされた動作位置(P2)の近くを通過する
動作を、パス動作といいます。
| 記述方法 | 意 味 |
|---|---|
| @P | 動作目標位置近傍(半径はコントローラにて自動設定)を通過動作します。 一般的なパス動作です。 |
| @1〜@255 | 指令値が、目標位置から指定した 半径(1〜255mm)に達した時点で、 次の動作に移ります。 |
| プログラム | 動作図 |
|---|---|
| Sub Main TakeArm Keep=0 Move P,@P P2 Move P,@0 P3 : |
 |
ティーチングされた動作位置(P2)へ移動して一旦停止
する動作を、エンド動作といいます。
| 記述方法 | 意 味 |
|---|---|
| 省略 | デフォルト値@0として処理します。 |
| @0 | モータ指令値が、目標位置(指定座標)に 達した時点で、次の動作に移ります。 |
| プログラム | 動作図 |
|---|---|
| Sub Main TakeArm Keep=0 Move P,@0 P2 Move P,@0 P3 : |
 |
エンコーダ値がティーチングされた目標位置(P2)に到達
したと判断することを、エンコーダ値確認動作といいます。
| 記述方法 | 意 味 |
|---|---|
| @E | エンコーダ値が、目標位置(指定座標)に 達した時点で、次の動作に移ります。 ロボットが確実に停止します。 |
| プログラム | 動作図 |
|---|---|
| Sub Main TakeArm Keep=0 Move P,@E P2 Move P,@0 P3 : |
|
〈ポーズ〉には、移動目標となる動作位置の変数名称を入力します。変数のポジション型(P型)、ジョイント型(J型)が
使用できます。変数の構成は4軸・6軸とも共通です。
各座標値の数値入力もできますが、変数P○○(○○は整数)か変数J○○をよく使用します。
| 変数名 | 機 能 | |||||||
|---|---|---|---|---|---|---|---|---|
| P型 | X | Y | Z | RX | RY | RZ | FIG | |
| J型 | J1 | J2 | J3 | J4 | J5 | J6 | J7 | J8 |
● ポジション型(P型)
ロボットの教示位置を格納するデータ型で、要素数は7つ(X, Y, Z, Rx, Ry, Rz, Fig)です。
3次元空間の座標と各座標軸の回転角、ロボットの形態を表すFig要素で表現されます。
● ジョイント型(J型)
ロボットの教示位置を表現するデータ型で、ロボットの各軸の軸値を要素とし、要素数は8つ(J1, J2, J3, J4, J5, J6, J7, J8)です。
4軸ロボットや6軸ロボットでもジョイント型のデータは8要素になります。
入力例
Move P,P1
P,P1
’変数P1の位置に、PTP動作で動作します。
動作オプションにはSpeed、Accel、Decel、Time などがあります。
オプション指定した動作命令を実行した時のみ有効となります。
| オプション | 単 位 | 説 明 |
|---|---|---|
| Speed (またはS) |
範囲 0.1〜100 単位 ”%” |
内部速度を指定します。同時に内部加速度、内部減速度も変更します。 Speed=n と指定した場合、内部加速度と内部減速度はn²/100になります。 |
| Accel | 範囲 0.0001〜100 単位 ”%” |
内部加速度を指定します。同時に内部減速度も変更します。 内部減速度には指定した内部加速度と同じ値が入ります。 |
| Decel | 範囲 0.0001〜100 単位 ”%” |
内部減速度を指定します。 |
| Time | 単位 ”ms”(ミリ秒) | 動作にかかる時間を指定します。 外部速度100%のときに移動にかける時間を指定します。 |
入力例
MoveL,P1,S=50
’P1の座標へ(CP 制御、内部速度=50%)移動します。
MoveP,P8,S=50,Accel=100
’P8の座標へ(PTP 制御、内部速度=50%、内部加速度=100%)移動します。
MoveP,P5,Time=3000
’P5の座標へ(外部速度=100%のときに3秒かけて)移動します。